

Point location motion S curve generation method
A technology of curve generation and point movement, which is applied in the direction of instruments, digital control, control/regulation systems, etc., can solve the problems of complex and cumbersome calculation methods, and achieve the effect of simple generation methods and smooth curves
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
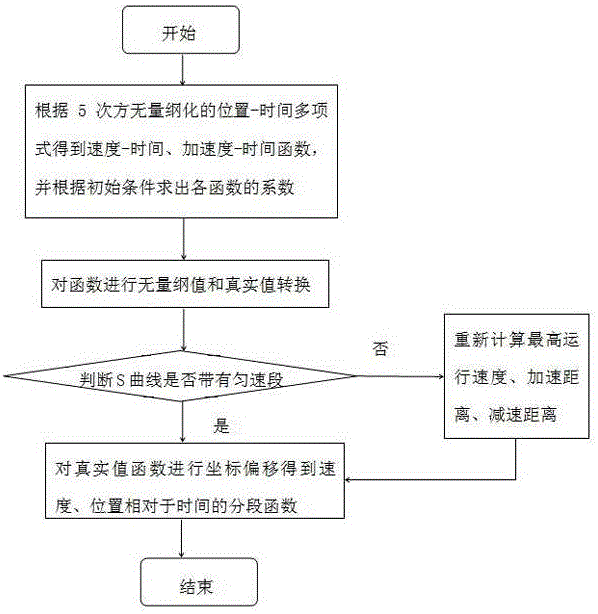
[0072] first step:
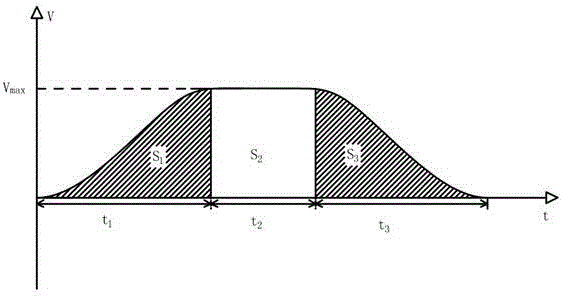
[0073] Set the preset value as the acceleration distance s 1 , deceleration distance s 3 Running distance s and maximum running speed v set ;
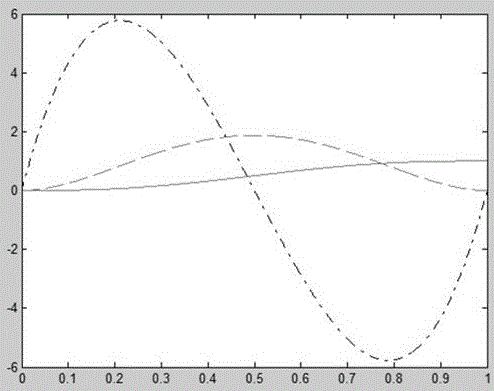
[0074] The position-time relationship of the S-curve is fitted into a function of a 5th power polynomial by dimensionless:
[0075] Y=F Y (T)=D 0 +D 1 T+D 2 T 2 +D 3 T 3 +D 4 T 4 +D 5 T 5 (1)
[0076] Differentiate it to obtain the velocity-time function, and differentiate the velocity-time function to obtain the acceleration-time function:
[0077] V=F V (T)=D 1 +2D 2 T+3D 3 T 2 +4D 4 T 3 +5D 5 T 4 (2)
[0078] A=F A (T) = 2D 2 +6D 3 T+12D 4 T 2 +20D 5 T 3 (3)
[0079] It is required to satisfy condition one: when T=0, Y=0, V=0, A=0, and satisfy condition two when T=1, Y=1, V=0, A=0.
[0080] Bring in to get D 0 、D 1 、D 2 、D 3 、D 4 、D 5 , put the calculated coefficients into formula (1), formula (2) and formula (3) to get 3 function equations with known coefficients, such...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More