

Small nuclear reconnaissance robot dangerous goods handling mechanism
A technology for handling mechanisms and robots, which is applied in the field of reconnaissance robots, and can solve problems such as difficulty in disassembling accessories of small-scale nuclear reconnaissance robots
Inactive Publication Date: 2014-07-16
SOUTHEAST UNIV
View PDF1 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
It must be able to be replaced quickly, and the above mechanism will make it difficult to disassemble the parts of the small nuclearized reconnaissance robot
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
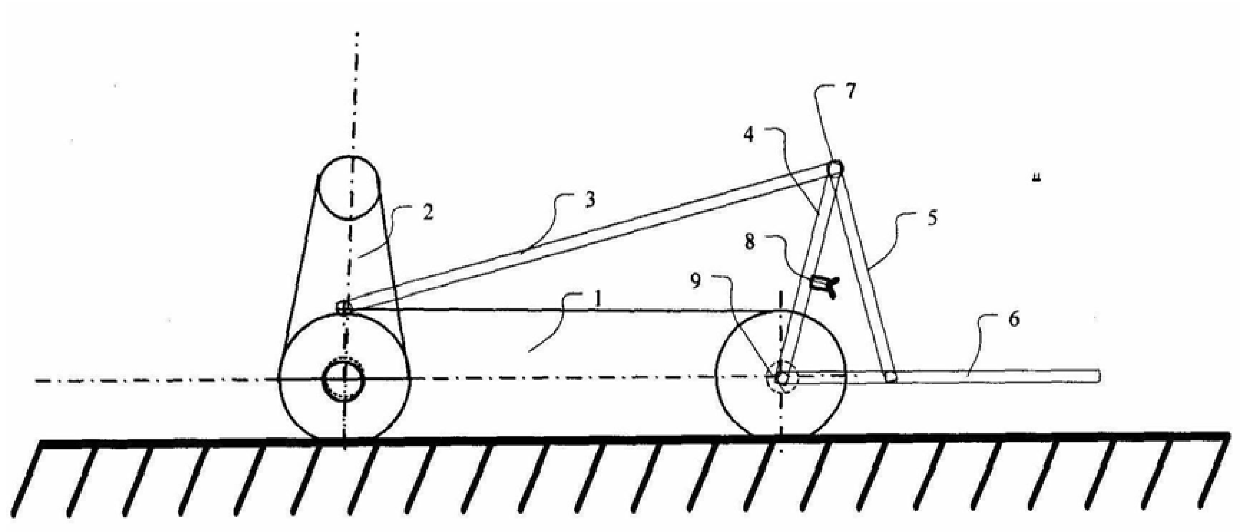
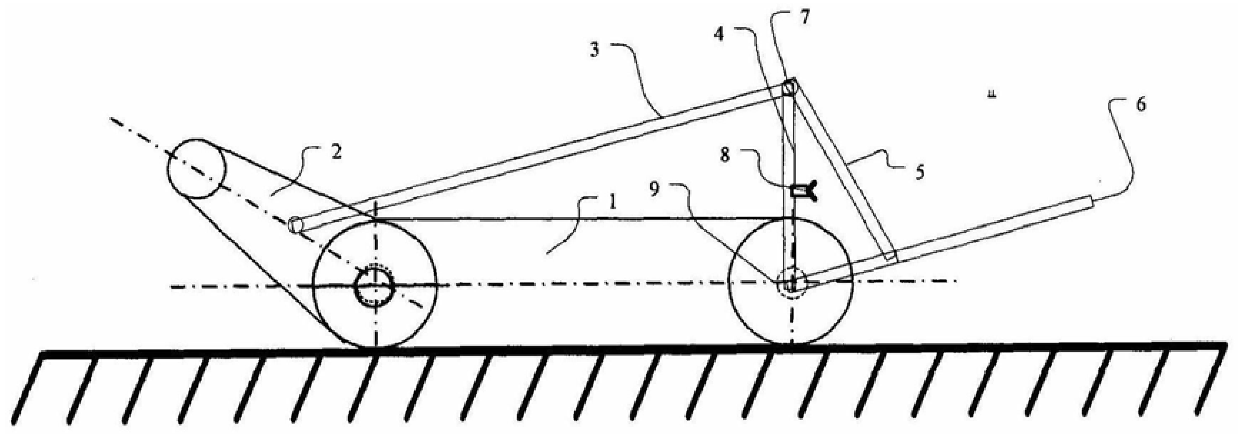
[0012] As shown in Figure 2, connecting rod 3, swing rod 4, leading arm 2 and vehicle body 1 constitute a parallel linkage mechanism. Current boom
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a mechanism for carrying dangerous goods by a small nuclearized reconnaissance robot. Including the small nuclearized reconnaissance robot, the top of the connecting rod is fixed by bolts on the leading arm of the small nuclearized reconnaissance robot, the end of the connecting rod is fixed on the support shaft, and the support shaft is movably connected with the top of the swing rod and the top of the auxiliary rod at the same time, and the end of the swing rod is connected to the top of the auxiliary rod. The hollow shaft set on the rear wheel shaft of the small-scale nuclear reconnaissance robot is movably connected. The front arm, connecting rod, swing rod, front lead arm and body of the small-scale nuclear reconnaissance robot form a parallel linkage mechanism, and the bucket is fixed on the end of the swing rod. The end of the rod is fixed on the bucket, and the swing rod is fixed with a camera for real-time observation of the working conditions of the bucket; the invention can enter the site of a nuclear, chemical and biological accident, and carry large dangerous goods, with light weight, detachable and simple structure , easy to use, and does not occupy the advantages of carrying space for small nuclear reconnaissance robots.
Description
Technical field of small-scale nuclear reconnaissance robot dangerous goods handling mechanism [0001] The present invention relates to reconnaissance robot technology, particularly a small nuclear reconnaissance robot dangerous goods handling mechanism. Background technique Under nuclearization war conditions, and antinuclearization terror, nuclearization emergency rescue and other handling dangerous accident actions etc. In non-combat operations, it is often necessary for operators to remotely control robots and use manipulators to carry dangerous goods. but when When it comes to the need to carry large volumes of dangerous objects, such as disposal of leftover shells, etc., due to the limitation of the size of the manipulator, the robot often It is often impossible to complete the handling task. [0003] Chinese patent application 201010170426.3 discloses a "multifunctional rescue obstacle-breaking robot", its technical The scheme is fixed by two winch seats, the bu...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J5/00
Inventor宋爱国钱夔崔建伟包加桐郭晏熊鹏文韩益利章华涛
OwnerSOUTHEAST UNIV