

A modular wheeled magnetic adsorption wall-climbing robot
A wall-climbing robot and modular technology, applied in manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of high manufacturing cost, non-detachable, poor motion performance, etc., and achieve the effect of improving utilization rate and firm adsorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
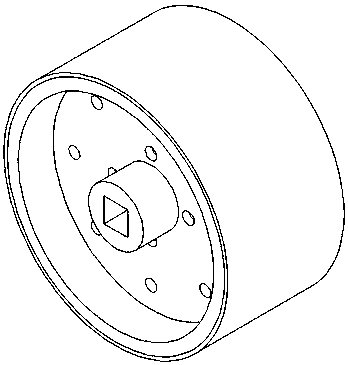
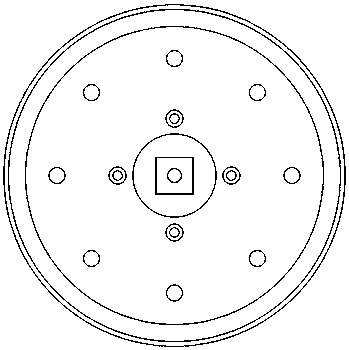
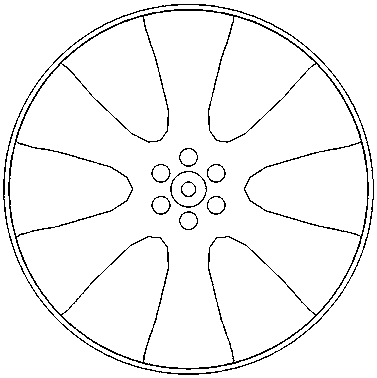
[0043] Such as Figure 1 to Figure 12 As shown, a modular wheeled magnetic adsorption wall-climbing robot, based on the wall-climbing robot, can be equipped with different types of manipulators or operating modules according to different task requirements, and carry out rust removal, painting, inspection, etc. on various magnetic surfaces. Corresponding extreme work. The wall-climbing robot adopts a permanent magnet adsorption form and a four-wheel four-wheel drive transmission scheme. Based on the modular design concept, it is mainly composed of two independent car body modules. Function, when working in special working spaces such as narrow and restricted, the robot can be quickly disassembled, transported and docked according to the needs of the work, and it is convenient to pass through discontinuous work areas or narrow transportation spaces.
[0044] The modular wheeled magnetic adsorption wall-climbing robot mainly includes two mutually independent car body modules and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More