

Force-aware space-adaptive gecko-like robot with active adhesion-detachment and attitude control
A robot and self-adaptive technology, applied in the field of robotics, can solve the problems of unresearched space surface adaptability and three-dimensional contact force perception, no active adhesion function, etc., to achieve the effect of light weight, ingenious structure and convenient processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
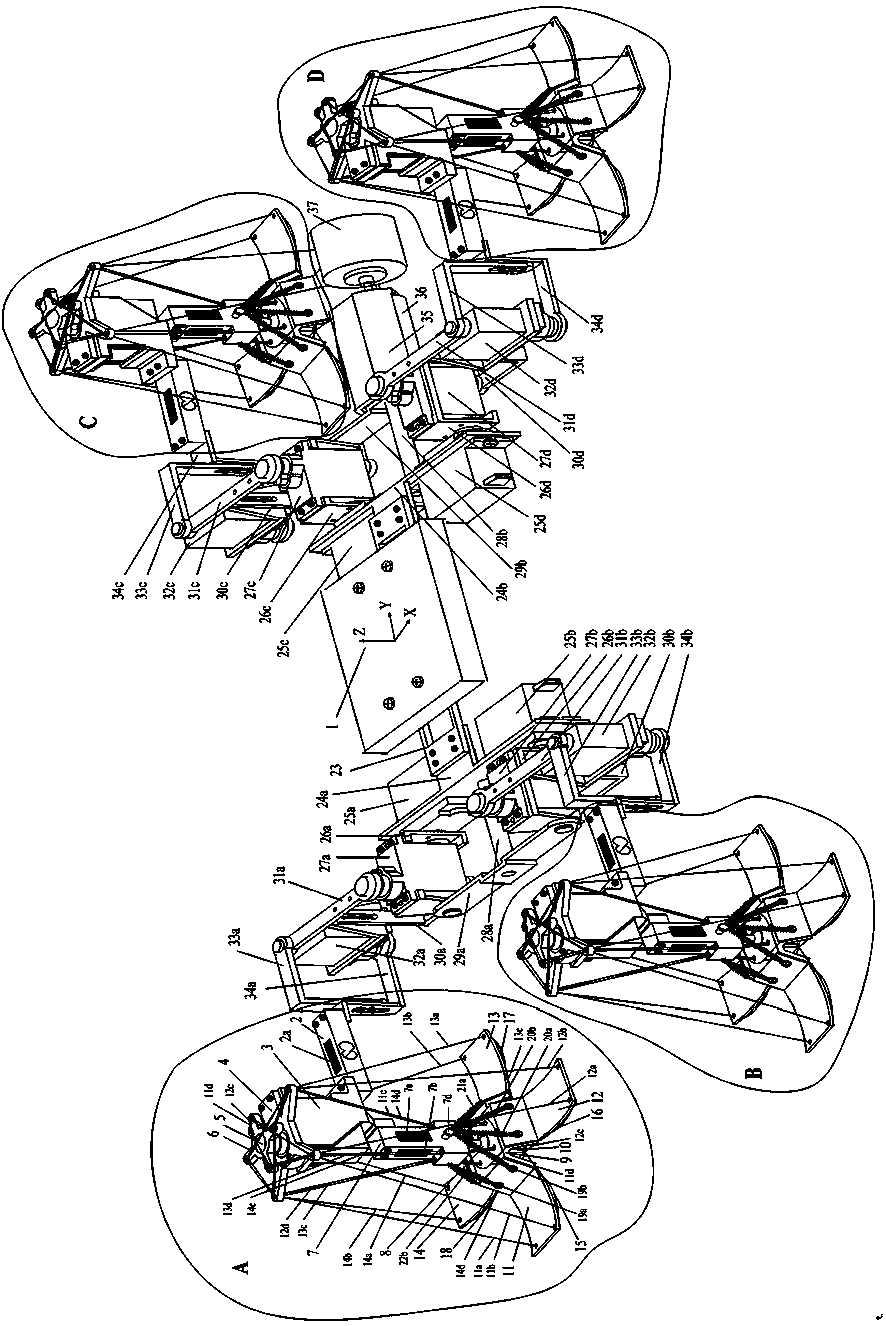
[0039] combine Figure 1-8 , this embodiment is a force-sensing space-adaptive imitation gecko robot with active adhesion and detachment and attitude control, including a robot control box 1, a one-dimensional force sensor 2, a Z-direction strain gauge 2a, a wire steering gear bracket 3, a rotating support frame 4, Rotating support frame a hole 4a, rotating support frame b hole 4b, rotating support frame c hole 4c, rotating support frame d hole 4d, wire steering gear 5, rotating flange 6, rotating flange a end 6a, rotating flange b end 6b, rotating flange c end 6c, rotating flange d end 6d, two-dimensional force sensor 7, two-dimensional force sensor No. 1 hole 7-1, two-dimensional force sensor No. 2 hole 7-2, two-dimensional force sensor No. 3 Hole 7-3, No. 4 hole 7-4 of the two-dimensional force sensor, X-direction strain gauge 7a, Y-directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More