

Indoor scene and object simultaneous recognition and modeling method
An indoor scene and modeling method technology, applied in the field of simultaneous recognition and modeling of indoor scene objects, can solve the problems of unfavorable object modeling and data storage, redundant data increase, influence, etc., so as to reduce the burden of data storage and improve the view. Graph method, the effect of reducing data redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
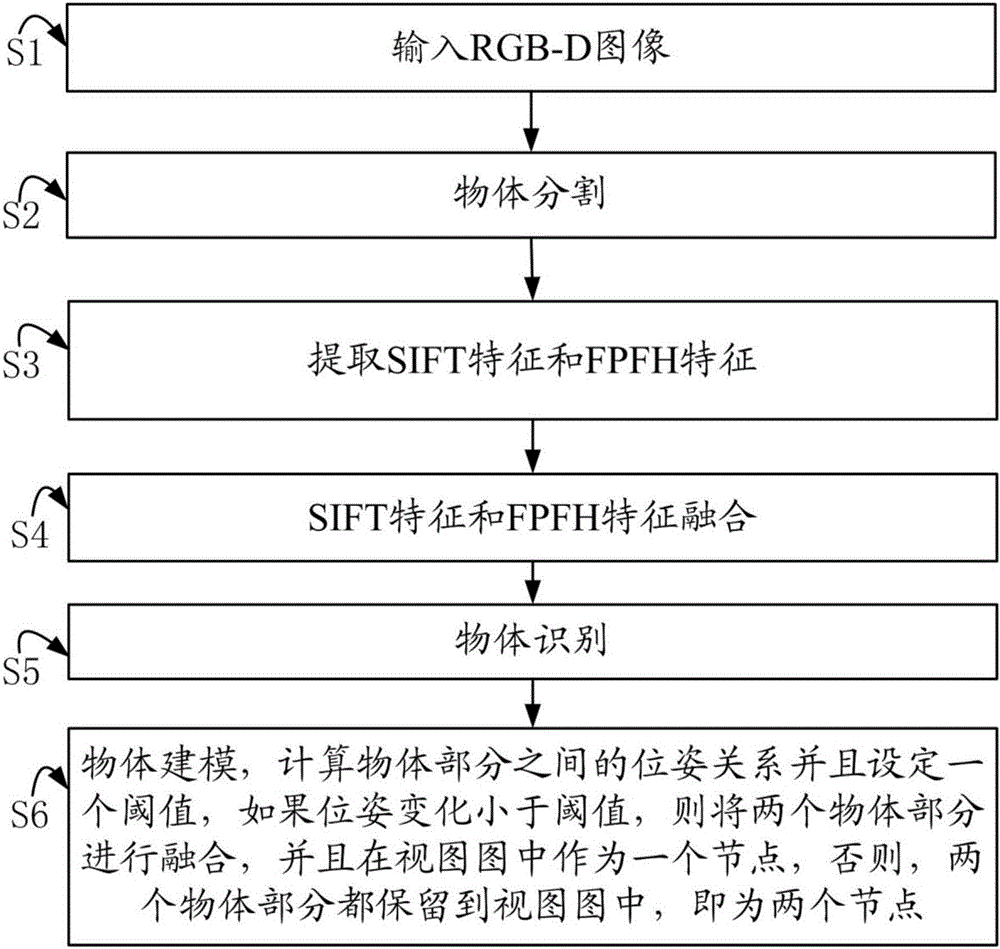
[0045] See figure 1 , a method for simultaneous identification and modeling of indoor scene objects, comprising the steps
[0046] S1: input RGB-D image;
[0047] S2: object segmentation;
[0048] S3: Extract SIFT features and FPFH features;
[0049] S4: Fusion of SIFT features and FPFH features;
[0050] S5: object recognition;
[0051] S6: Object modeling, calculate the pose relationship between object parts and set a threshold, if the pose change is less th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More