Fish group individual target tracking method based on visual attention model
A target tracking and attention technology, applied in character and pattern recognition, instruments, computing, etc., can solve the technical difficulties of water quality monitoring system, the inability to achieve real-time tracking and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings.
[0056] refer to Figure 1 to Figure 6 , a fish target tracking method based on selective attention, including the following steps:
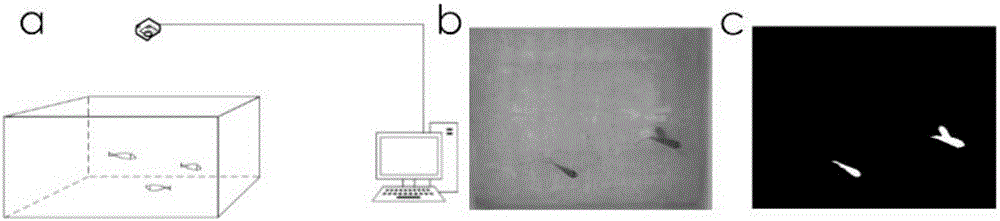
[0057] 1) Take the crucian carp group (4 to 8) as the monitoring object, and obtain the real-time video of the behavior of the fish group through the camera, so as to realize the real-time monitoring of each individual in the group ( figure 1 ). First, take tracking one target fish in the fish school as an example to describe the algorithm flow.
[0058] 2) Algorithm initialization, manually obtain the initial outline of the target fish and track the fish's field of view.
[0059] 2.1) Get the initial profile f of the target fish 0 . First, pause the playback of the current video stream to obtain the outline of the target fish in the current frame. To this end, manually find the target fish in the current frame, and click any point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More