

Shelf posture deviation detecting method and system based on characteristic information graph
A feature information and deviation detection technology, which is applied in the field of warehouse shelf detection, can solve the problems of shelf parking posture changes, handling failure, shelf deviation, etc., and achieve the effect of low price, low cost and good system versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0032] The invention discloses a method for detecting shelf position deviation based on feature information graphics, which includes the following steps:
[0033] Step 1, install the upward-looking camera on the robot, so that the optical axis of the upward-looking camera faces upward, so that it is perpendicular to the bottom plane of the shelf;
[0034] Step 2, calibrate the mapping relationship between the camera pixel coordinate system and the robot coordinate system;
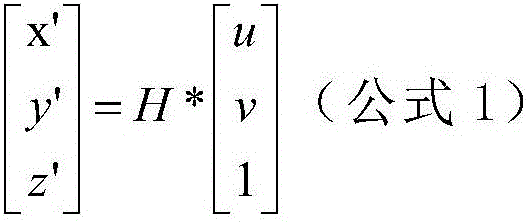
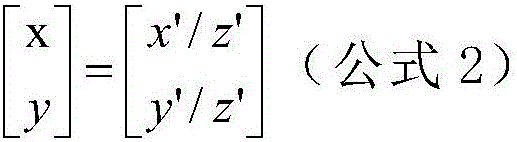
[0035] The mapping relationship refers to the homography matrix H of the camera, and its mathematical meaning is:
[0036]
[0037]
[0038] Among them, select the plane where the bottom of the shelf is located after the robot lifts the shelf as the reference plane, is the pixel coordinate of a point on the reference plane on the camera imaging plane, is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More