

Robust fault-tolerant control method for small unmanned aerial vehicle flight control system
A technology for small unmanned aerial vehicles and flight control systems, which is applied in the field of robust fault-tolerant control and robust fault-tolerant control of uncertain discrete time-delay control systems to ensure global robustness, good robustness, and avoid slow convergence. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further explained below in conjunction with the accompanying drawings.
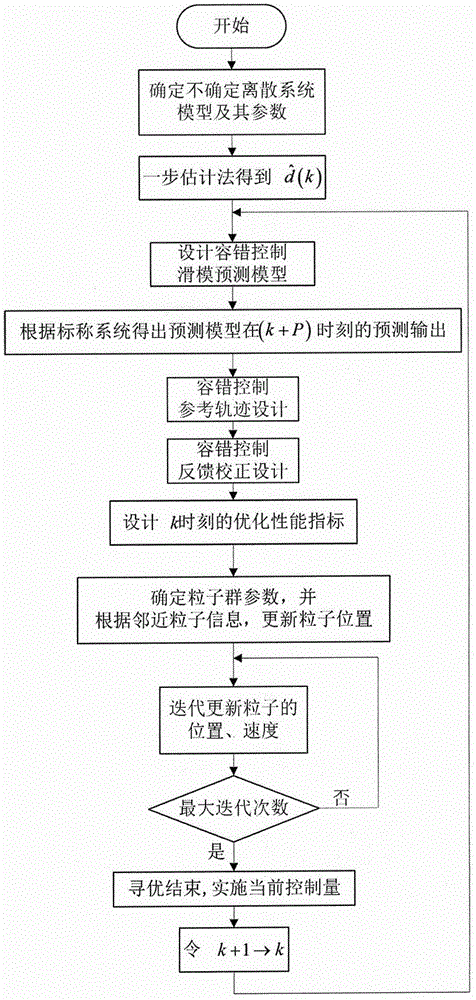
[0064] Such as figure 1 As shown, a robust fault-tolerant control method for a small unmanned aerial vehicle flight control system, according to the uncertain discrete system with time-varying time-delay in the case of actuator failure, a quasi-integral sliding mode prediction model is constructed, the model It has time-varying characteristics, and can make the system state trajectory be located on the switching surface from the initial moment, ensuring the global robustness of the entire dynamic process, and better handling the influence of system time delay and actuator failure on the asymptotic stability of the sliding mode; Using the improved chaotic particle swarm optimization algorithm, the rolling optimization process is improved. Compared with the traditional derivative method, this method can quickly and accurately solve the control law that satisfies the inpu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More