

Robot joint zero point automatic calibration end effector and method thereof
A robot joint, automatic calibration technology, applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of difficult to guarantee reliability, low efficiency, unsatisfactory and other problems, to reduce processing accuracy and cost, save labor, improve The effect of controlling precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiments are only used to explain the present invention and do not constitute a limitation to the protection scope of the present invention.
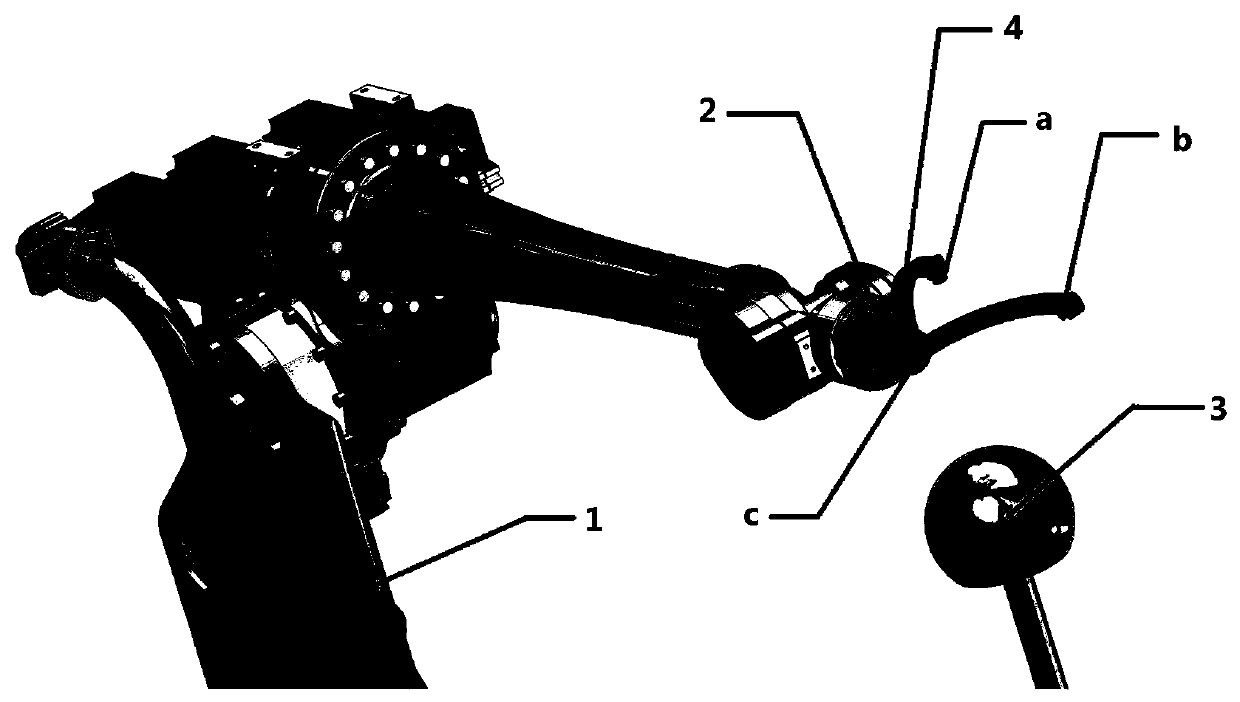
[0018] figure 2 It shows an embodiment of a robot joint zero point automatic calibration end effector of the present invention, which includes a mechanical gripper 2 installed on the robot body 1 and an external positioning ball 3. The mechanical gripper 2 consists of three The mutually orthogonal and vertical laser distance sensors 4 are composed of laser distance sensors a, laser distance sensors b and laser distance sensors c respectively. The three laser distance sensors 4 are located on the surface of the positioning ball 3 by contact.
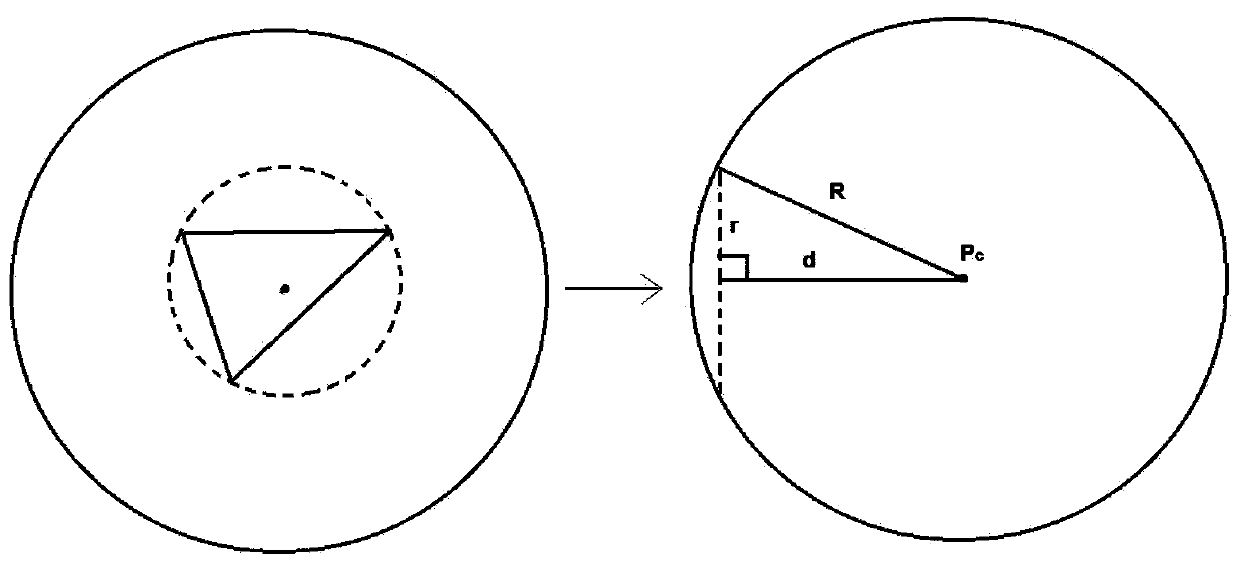
[0019] Such as Figure 4 The shown automatic calibration method for the robot joint zero point for cali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More