

Force feedback-based industrial robot auxiliary assembling and flexible docking method
An industrial robot and auxiliary assembly technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as uneven force, and achieve the effect of improving docking efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The industrial robot flexible force control system of the present invention will be described in detail below in conjunction with the accompanying drawings. These specific implementations are only exemplary and not intended to limit the scope of protection of the present invention.
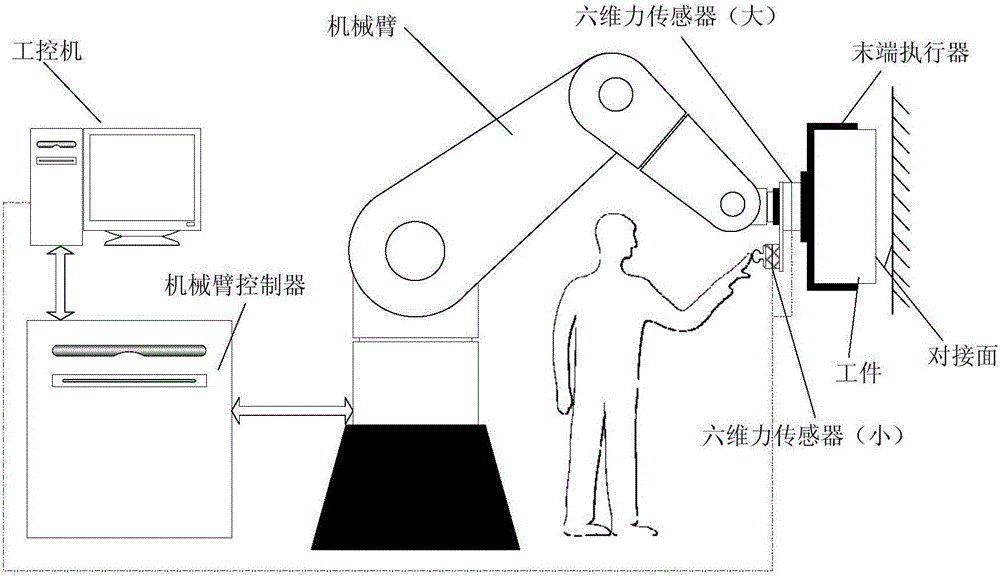
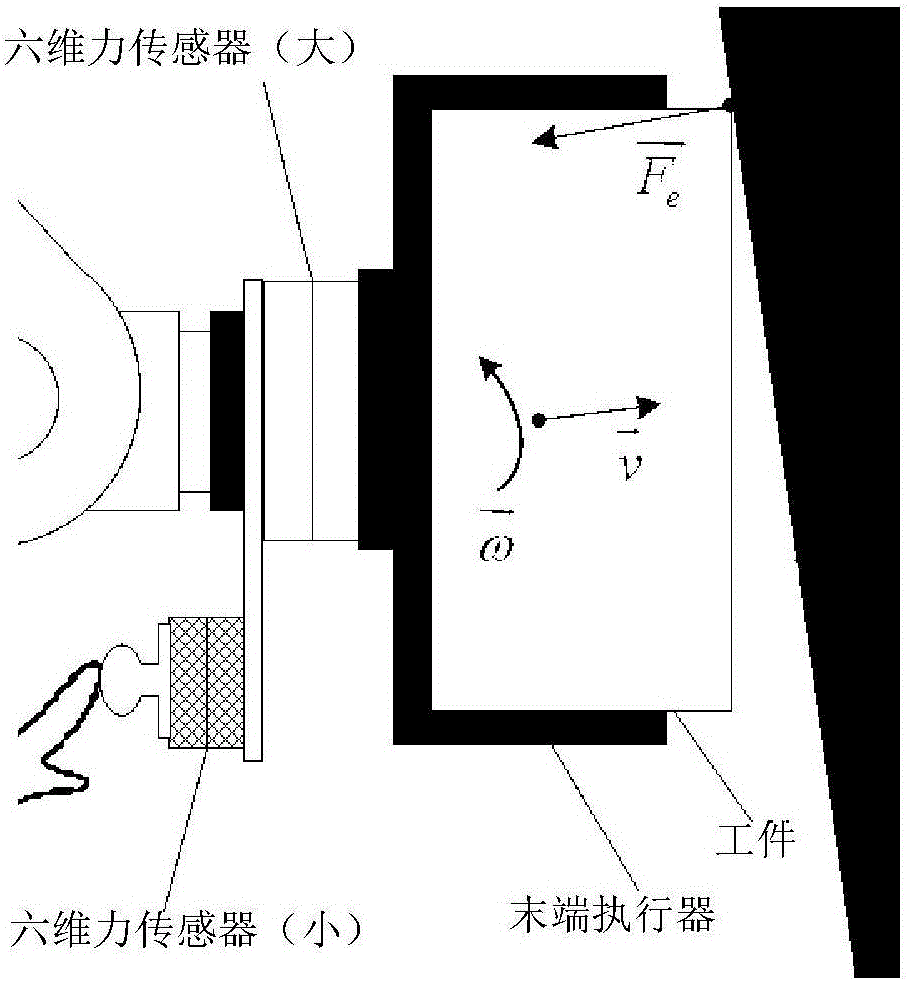
[0029] see figure 1 , figure 1 It shows the industrial robot flexible force control system of the present invention, similar to the system in the prior art, the system is mainly composed of industrial computer, industrial robot controller, industrial robot, two six-dimensional force sensors, end effector, workpiece and so on. Among them, the large six-dimensional force sensor has a large range and is installed between the end of the industrial robot and the load (ie, the end effector and the workpiece). After the gravity compensation algorithm eliminates the influence of the load's gravity, it can sense the external force on the load. The small six-dimensional force sensor has a small mea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More