Wheeled mobile robot
A mobile robot, wheeled technology, applied in the direction of wheels, motor vehicles, transportation and packaging, etc., can solve the problems of insufficient body stability and shock resistance, low obstacle-crossing ability, and insufficient stability of the body, and achieve outstanding obstacle-crossing performance. , The structure is simple and reliable, and the effect of improving the performance of obstacle crossing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
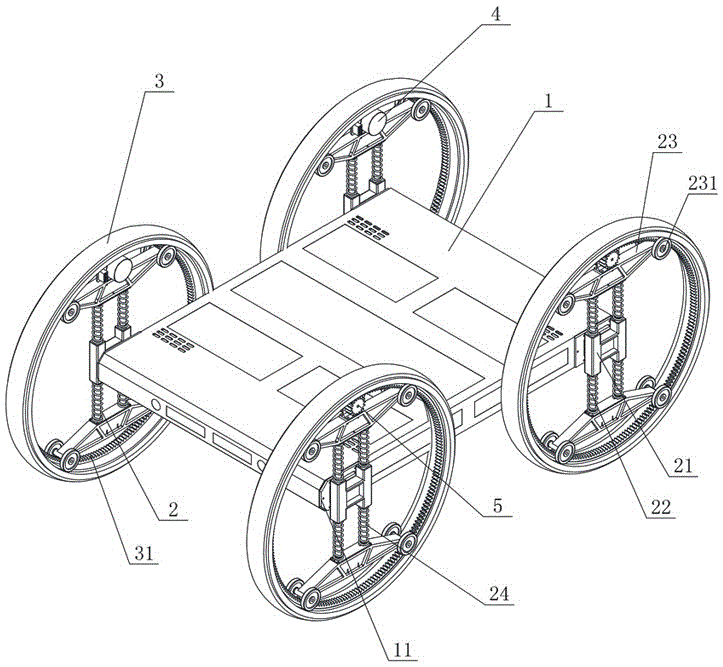
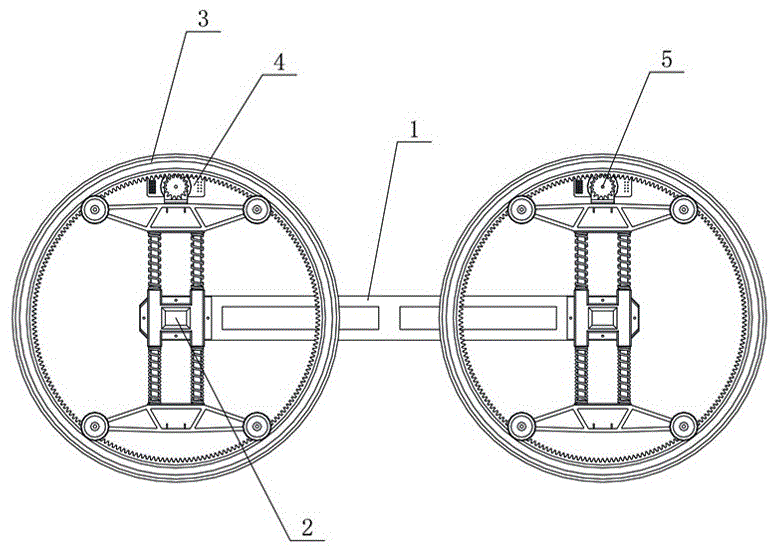
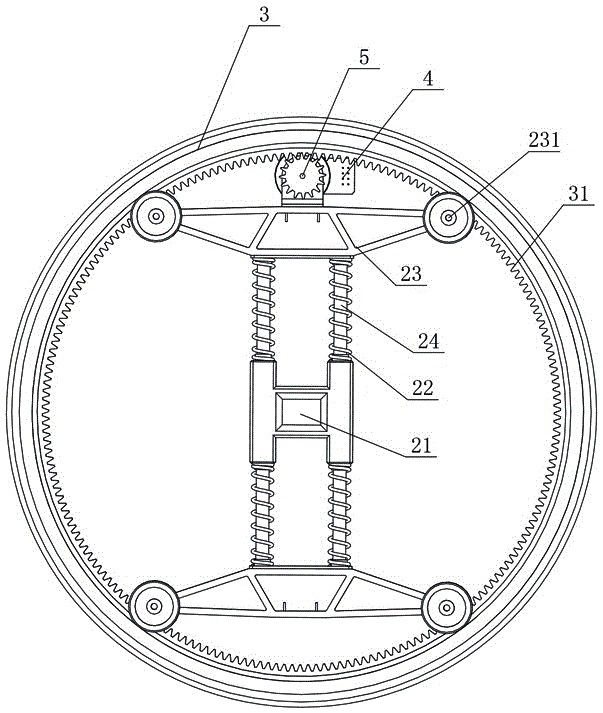
[0029] Figure 1 to Figure 6 An embodiment of the wheeled mobile robot of the present invention is shown, the robot includes a vehicle frame 1, a suspension support device 2, an annular wheel body 3, a driving motor 4 and a gear 5, and the annular wheel body 3 is mounted on the inner ring wall A circle of inner ring gear 31 is provided, the drive motor 4 is installed on the suspension support device 2, the gear 5 is connected with the output end of the drive motor 4, the suspension support device 2 is supported on the inner ring of the annular wheel body 3, and the gear 5 and the The ring gear 31 is meshed, and the suspension support device 2 is separately installed on both sides of the front and rear ends of the vehicle frame 1 . When working in the field, robots encounter complex and changeable situations. In smooth road condition...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More