

Robot inter-detection method and robot inter-detection device
A detection method and detection device technology, applied in the field of robotics, can solve the problems that the robot cannot detect the position, affect the operation of the robot, and cannot see the overall outline of the robot, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
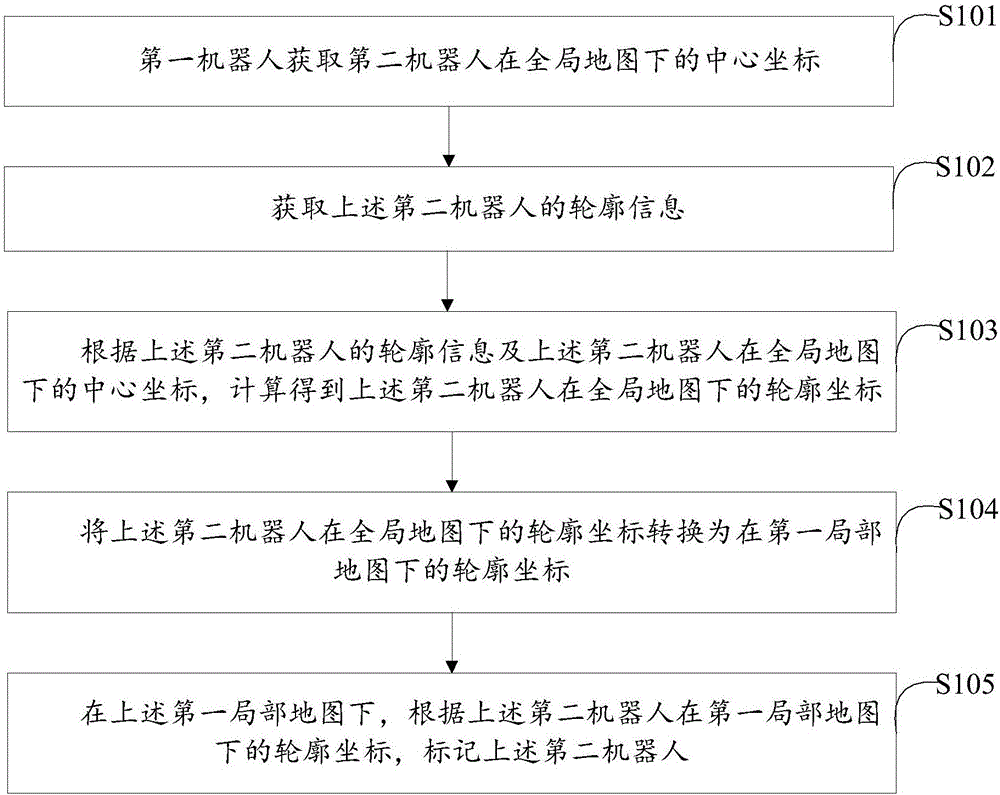
[0023] figure 1 The implementation flow of the robot mutual detection method provided by Embodiment 1 of the present invention is shown, and the details are as follows:
[0024] In step S101, the first robot acquires the center coordinates of the second robot under the global map.
[0025] In the embodiment of the present invention, in order to better illustrate the solution of the embodiment of the present invention, a first robot and a second robot are briefly introduced first. Among all the robots in the same building, select any one of them as the first robot in the embodiment of the present invention, and use the solution of the embodiment of the present invention to detect the positions of other robots. Since the present invention provides a method for mutual detection of robots, all other robots except the above-mentioned first robot can be used as the second robot. In fact, since any robot can detect other robots using the solution of the embodiment of the present in...
Embodiment 2
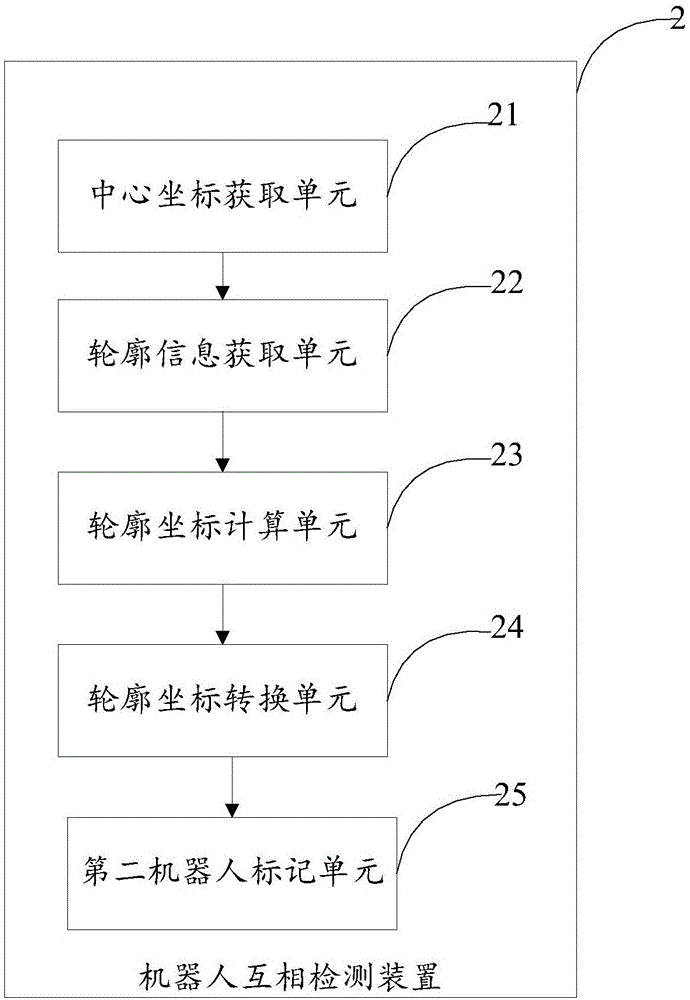
[0047] figure 2 A specific structural block diagram of the robot mutual detection device provided by the second embodiment of the present invention is shown, and for the convenience of description, only the parts related to the embodiment of the present invention are shown. The robot mutual detection device 2 includes: a central coordinate acquisition unit 21 , a contour information acquisition unit 22 , a contour coordinate calculation unit 23 , a contour coordinate conversion unit 24 , and a second robot marking unit 25 .
[0048] Wherein, the central coordinate acquisition unit 21 is used to acquire the central coordinates of the second robot under the global map;
[0049] An outline information acquiring unit 22, configured to acquire the outline information of the above-mentioned second robot;
[0050] The contour coordinate calculation unit 23 is used to calculate and obtain the above-mentioned second robot according to the contour information of the second robot obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More