

Multi-intelligent agent based unmanned electric car automatic overtaking system and method
A technology for electric vehicles and unmanned driving, which is applied to vehicle components, input parameters of external conditions, control devices, etc., can solve the problems of independent distribution of multiple actuators and model uncertainty, and achieves the goal of overcoming the independent distribution of multiple actuators and overcoming model uncertainty. Uncertainty, comfort and the effect of combined driving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
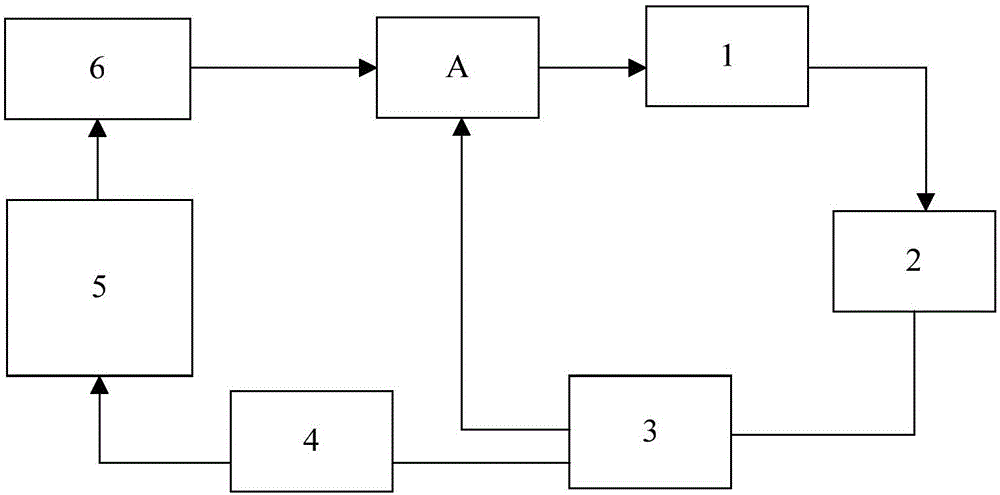
[0048] like figure 1 As shown, the described multi-agent based unmanned electric vehicle automatic overtaking system is provided with:
[0049] Vehicle-mounted sensor 1, the vehicle-mounted sensor 1 is used to collect road information ahead of the unmanned electric vehicle;
[0050] The road feature extraction module 2, the road feature extraction module 2 is used to input the road information in front of the driverless electric vehicle collected by the on-board sensor 1, and perform feature extraction on the collected image, and then calculate the road width in front of the vehicle in real time and other information.
[0051] The minimum safety distance analysis module 3, the minimum safety distance analysis module 3 is used to establish a minimum safety distance model that meets the automatic overtaking requirements of unmanned electric vehicles.
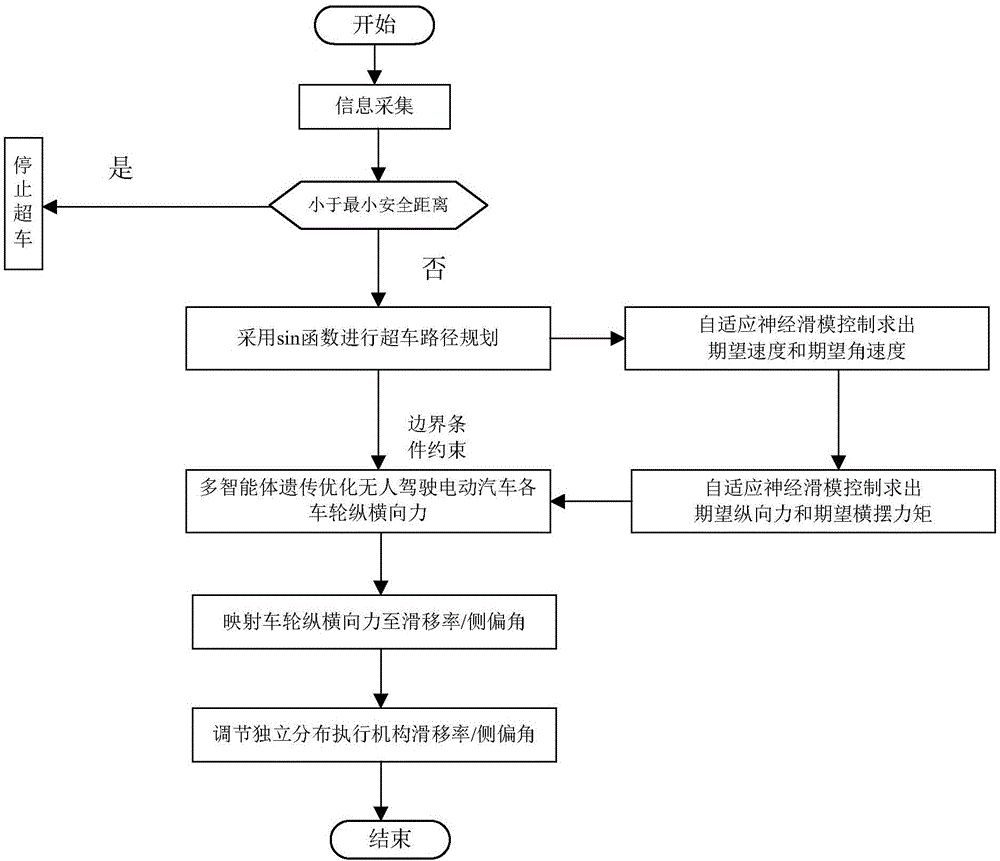
[0052] The overtaking path planning module 4, the overtaking path planning module 4 is used to set the sine function form as th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More