

Micro instrument clamping mechanism for minimally invasive surgery
A clamping mechanism and minimally invasive surgery technology, which is applied in the field of medical devices, can solve the problems of structural design, human injury, etc., and achieve the effects of increasing the equivalent allowable strength, avoiding injury, and increasing the diameter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
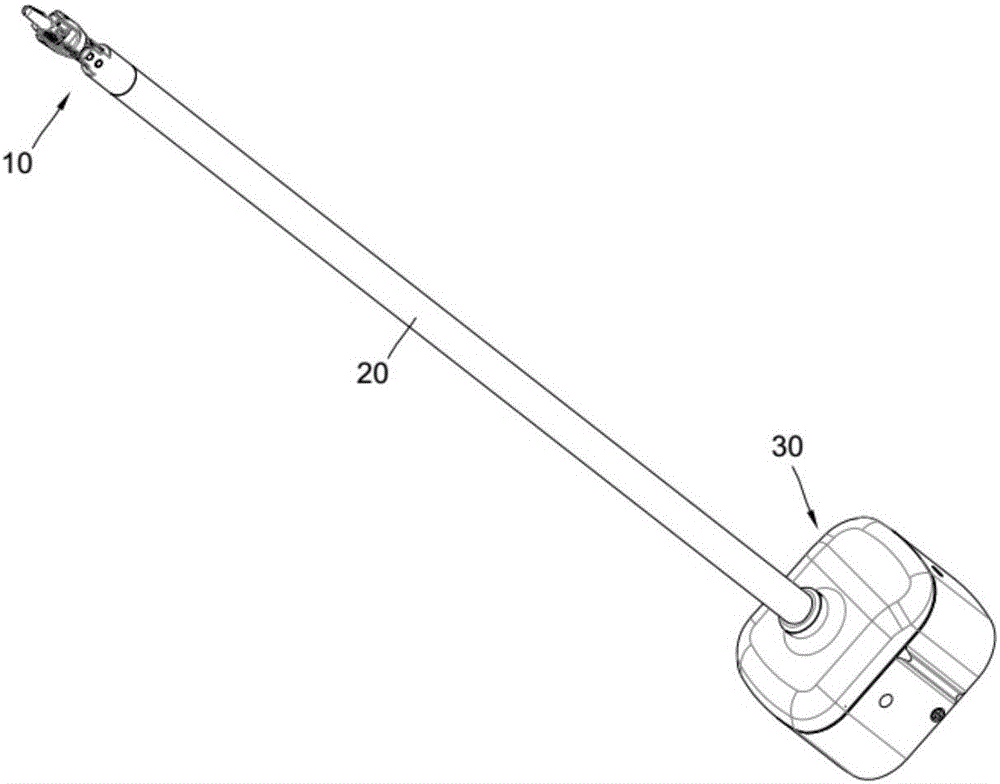
[0032] Such as figure 1 , a micro instrument clamping mechanism for minimally invasive surgery, comprising a jaw mechanism 10 and a control mechanism 30 connected by a carbon fiber tube 20 .
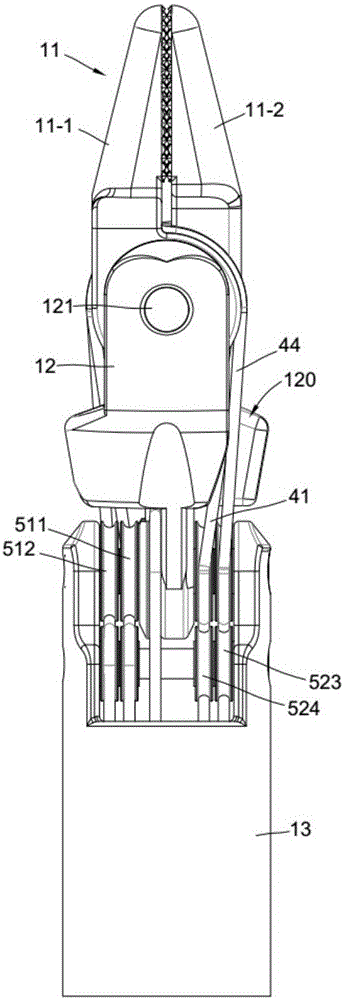
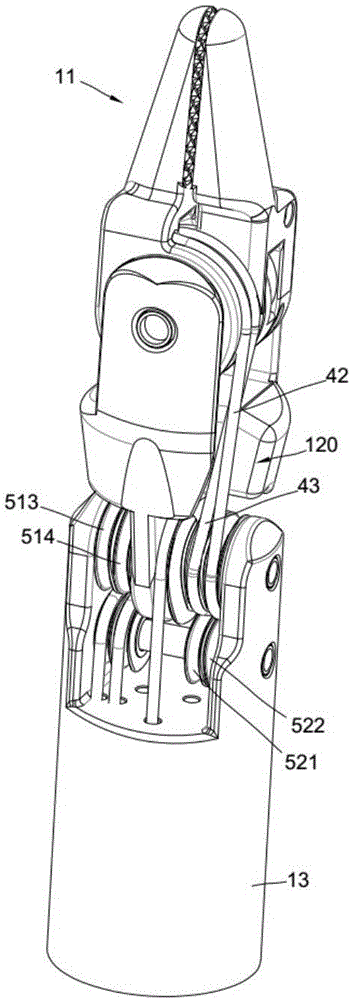
[0033] Such as figure 2 , the jaw mechanism includes a pair of jaws 11, a middle support 12 whose top is hinged to the pair of jaws and whose bottom is hinged to the bobbin 13.
[0034] combine Figure 5 to Figure 8, the pair of jaws 11 includes a left jaw 11-1 and a right jaw 11-2, in the left jaw 11-1 and the right jaw 11-2, the root of any jaw is provided with an installation notch 110, One side of any jaw is provided with a radial terminal installation hole 111 and the first wire rope groove, and the other side of any jaw is provided with an axial terminal installation hole 112 and a second wire rope groove. The center of the first wire rope groove angle and the central angle of the second wire rope groove are less than 360 degrees. The left claws 11-1 and the right claws 11-2 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More