

Space three-degree-of-freedom parallel mild operation device and mild mode thereof
An operating device and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large errors, cumbersome processes, and low robot pose positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Hereinafter, the spirit and essence of the present invention will be further elaborated in conjunction with the drawings and embodiments.
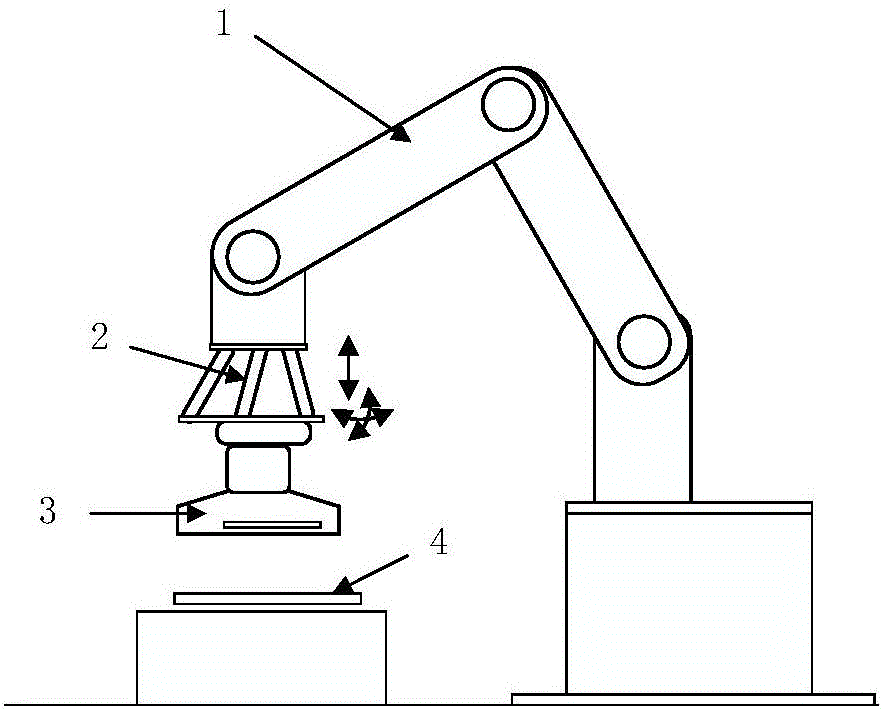
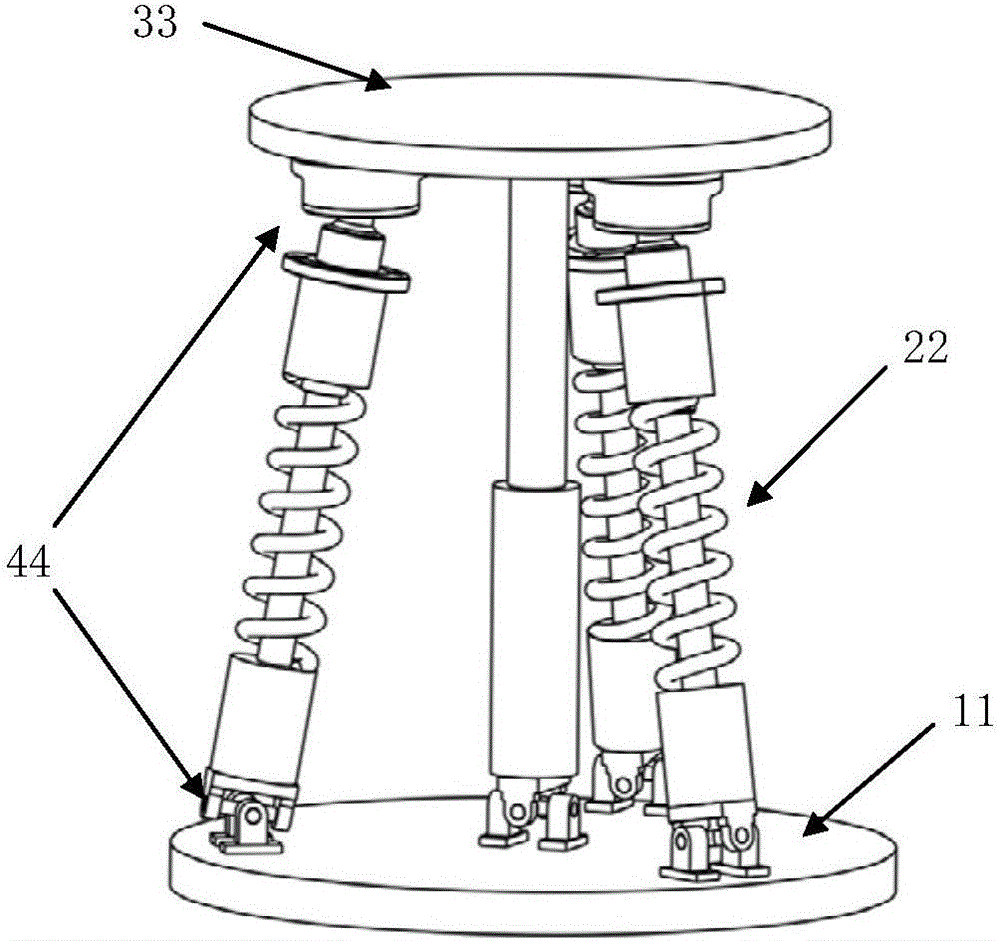
[0017] As an embodiment of the present invention, figure 1 It shows that the parallel compliant operation device claimed in the present invention is used in a robot-constrained operation process, specifically an application in a robot-assisted grinding process. combined reference figure 2 , the operating device 2 is arranged between the end flange of the robot 1 and the grinding tool 3, connected to the arm of the robot through the interface 11 of the parallel compliant operating device 2, and connected to the grinding tool 3 through the bracket 33; the parallel compliant operation The device 2 is mainly used to accurately control or adjust the force exerted by the grinding tool 3 on the workpiece 4 to be processed, to ensure that the force is along the normal direction of the surface of the workpiece 4 to be processed and has a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More