

Pneumatic finger with replaceable contact
A technology of pneumatic fingers and contacts, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of difficulty in completing complex and fine movements, the influence of pneumatic fingers on the accuracy of movements, and the difficulty in adjusting the contact force of the grasping point. Take the effect of flexibility, better anti-skid effect and ingenious structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
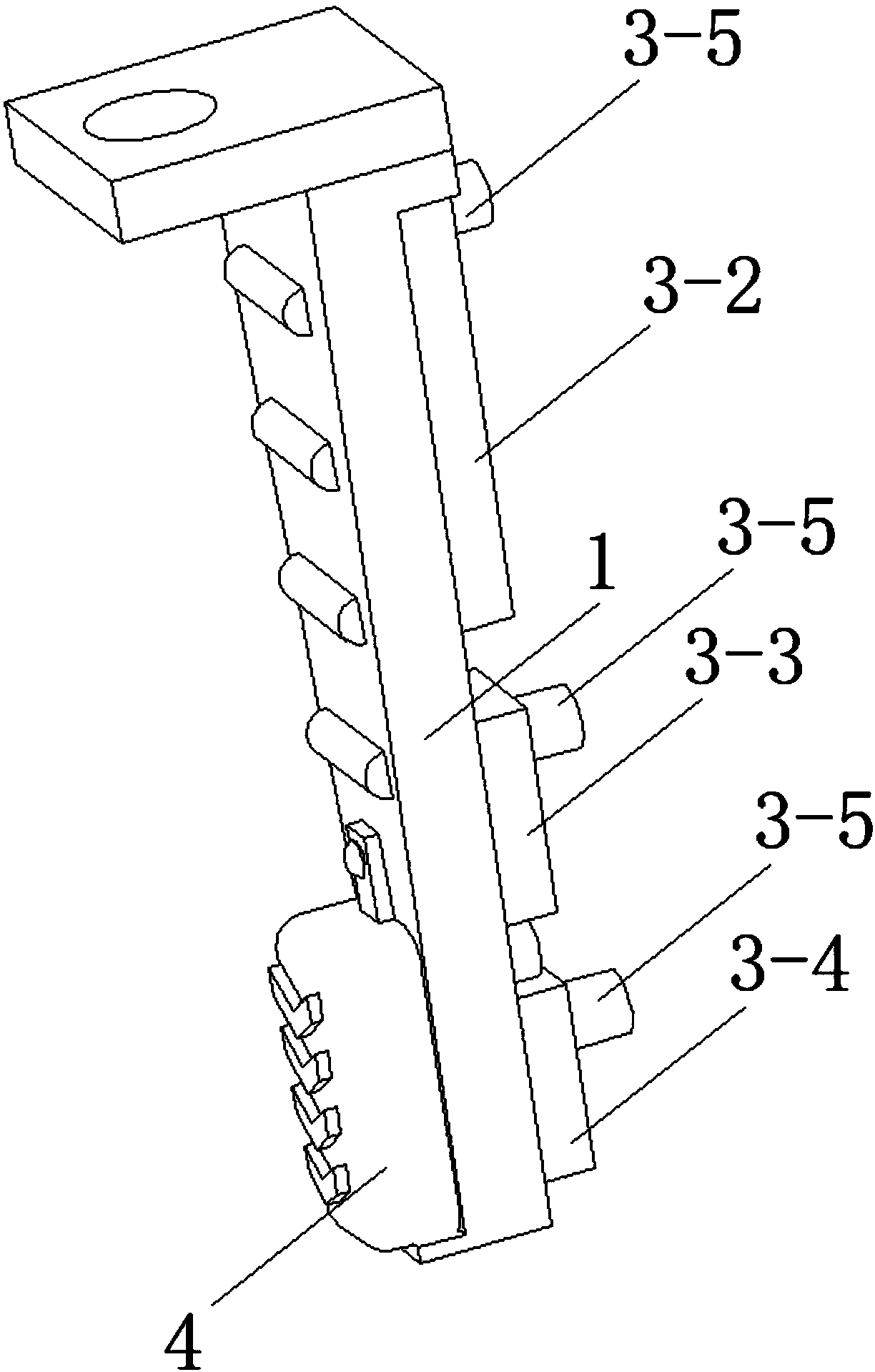
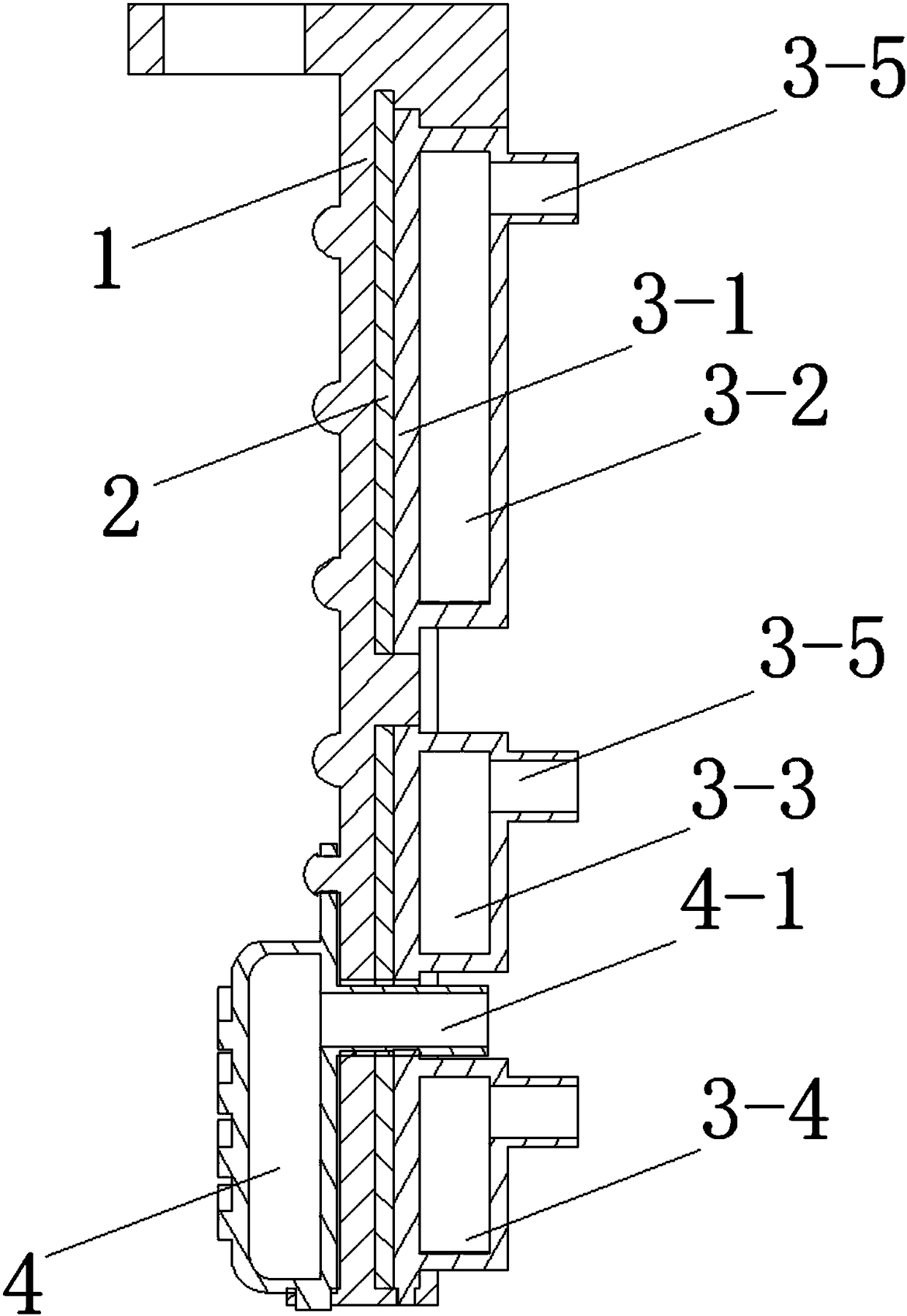
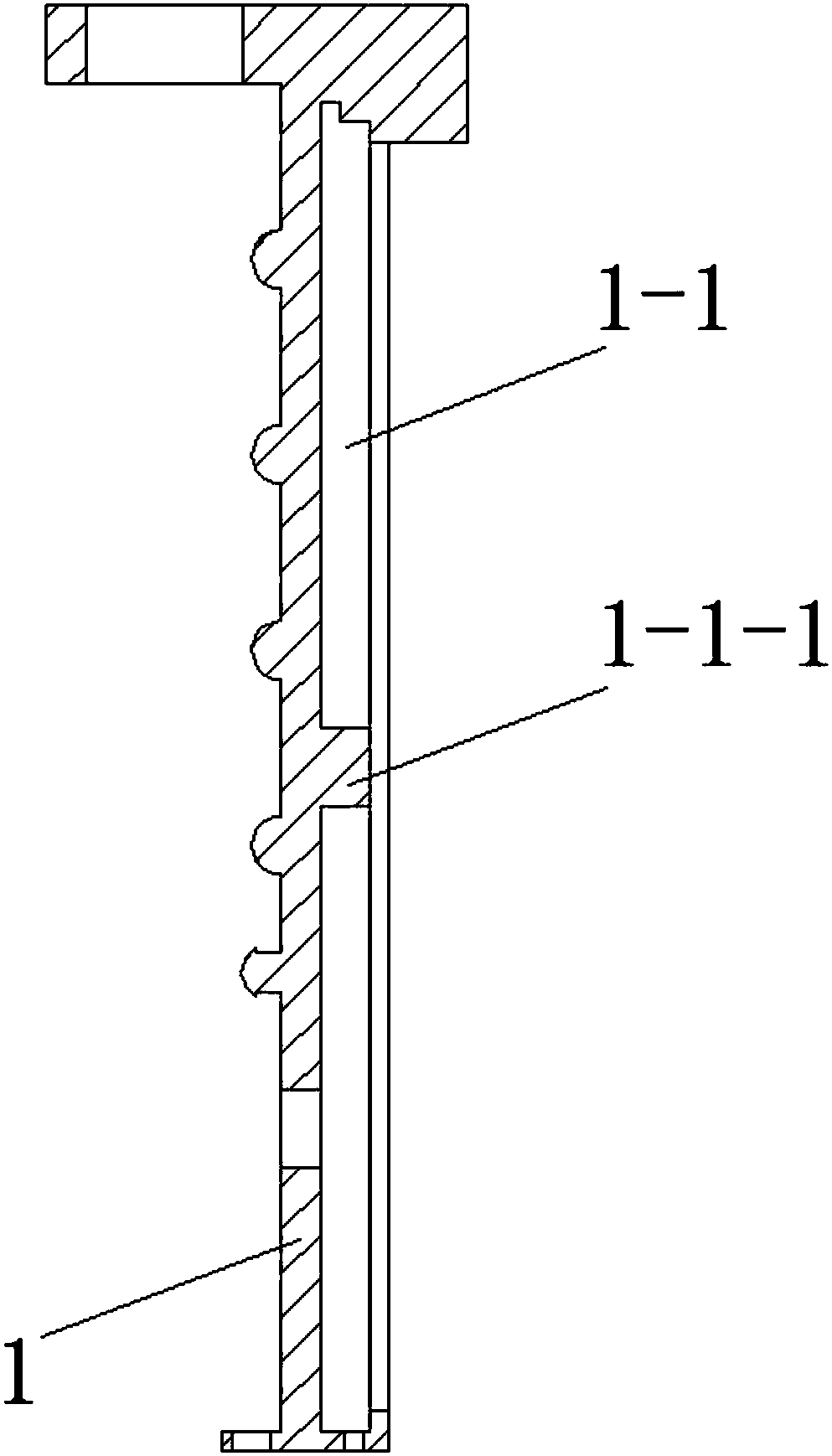
[0030] See Figure 1 to Figure 5 , the pneumatic finger with replaceable contacts in this embodiment includes a base frame 1 , a supporting shrapnel 2 , an outer drive assembly 3 and a detachable contact 4 .
[0031] The bottom of the base frame 1 is mounted on the end of the robot. The width of the base frame 1 gradually decreases from top to bottom. The supporting elastic piece 2 is arranged in the base skeleton 1 . The outer drive assembly 3 includes a base sheet 3-1 and a bottom-finger drive cavity 3-2, a middle-finger drive cavity 3-3 and a fingertip drive cavity 3- 5. The substrate sheet 3-1 is detachably fixed on one side of the substrate skeleton 1 . The driving cavity 3-2 for the base of the finger, the driving cavity 3-3 for the middle finger and the driving cavity 3-5 for the fingertip are all provided with air pipes 3-5 communicating with the respective inner cavities. The finger root drive cavity 3-2, the middle finger drive cavity 3-3 and the fingertip drive...
Embodiment 2
[0037] This embodiment is basically the same as Embodiment 1, except that the detachable contact 4 is a solid structure with elasticity.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More