

Under-actuated fruit-vegetable picking end executor device and picking method
An end effector and under-actuated technology, applied in harvesting machines, agricultural machinery and implements, applications, etc., can solve the problems of high labor intensity, low picking efficiency, strong seasonality of fruits and vegetables, etc., and achieve reasonable structural design and simple device structure , the effect of efficient picking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in further detail below in conjunction with accompanying drawing:
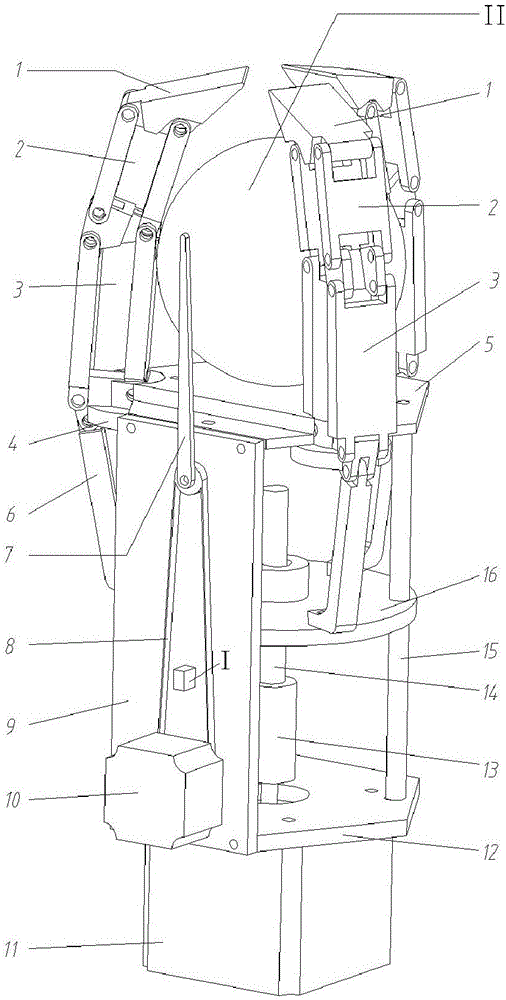
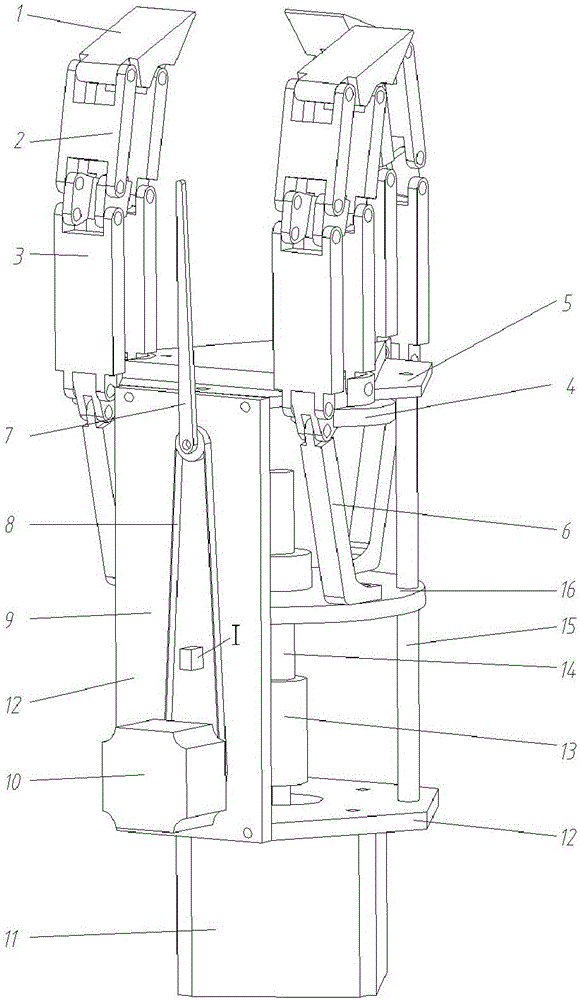
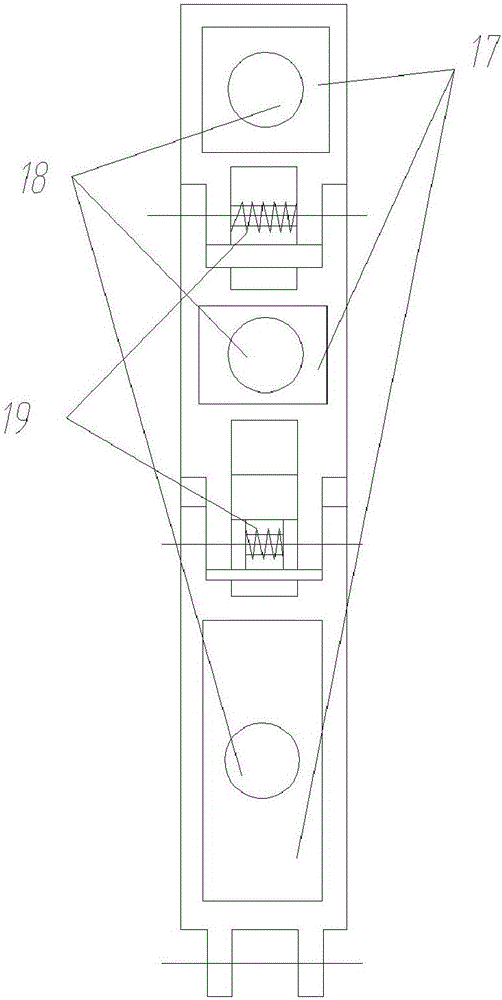
[0019] like figure 1 , figure 2 and image 3 As shown, an underactuated fruit and vegetable picking end effector device includes a palm 5, 2-4 finger bases 4 evenly distributed and fixed on the palm 5 (three finger bases 4 in this embodiment), finger bases The fingers with the same structure are installed on the seat 4, and the fingers have three joints, which are respectively proximal knuckle 3, middle knuckle 2, and far knuckle 1. The side of each knuckle in contact with fruits and vegetables is glued with rubber 17 and force Sensor 18, wherein one end of the proximal knuckle 3 is hinged with the finger base 4, the other end of the proximal knuckle 3 is connected with the middle knuckle 2 through a linkage mechanism, and the other end of the middle knuckle 2 is connected with the far knuckle 1 through a linkage mechanism; Below the palm 5, three support rods 15 w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More