

Electromagnetic type rigidity-variable flexible rotating joint
A technology of flexible rotation and variable stiffness, applied in the field of robotics, can solve problems such as delaying the response of joint stiffness changes, increasing joint volume and weight, and increasing joint manufacturing costs, achieving fast response, simple internal structure, and compact volume.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
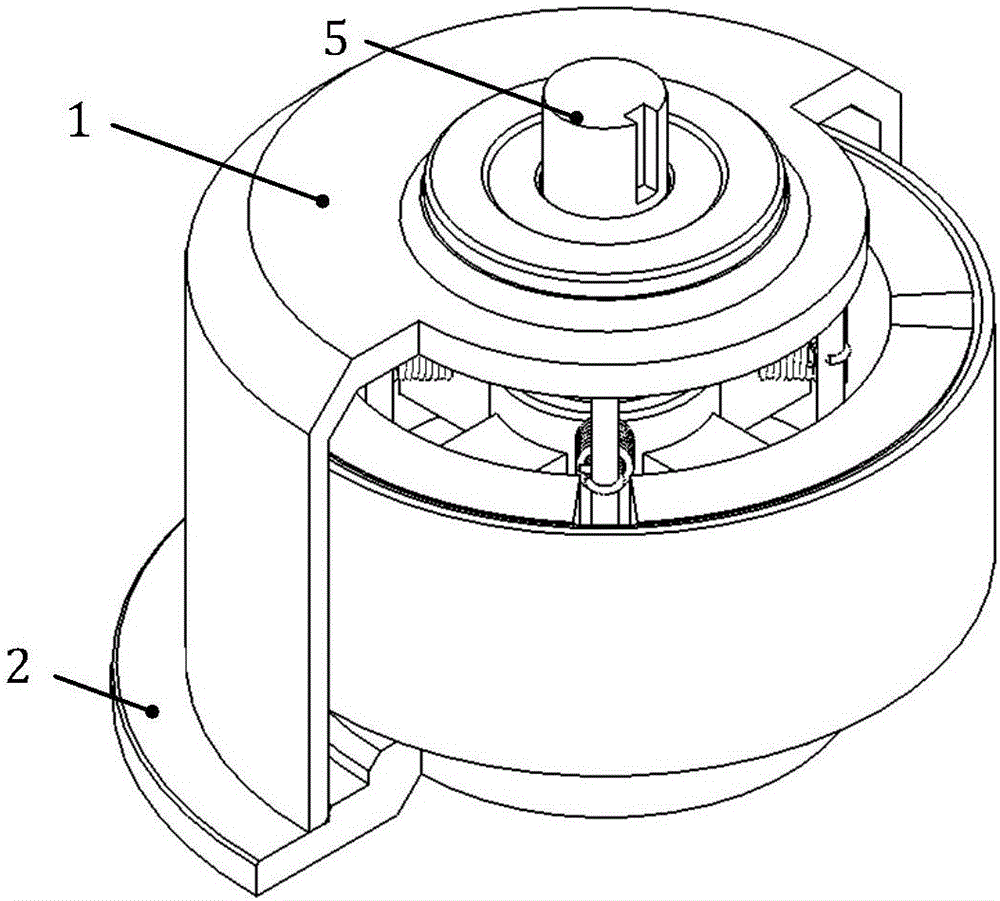
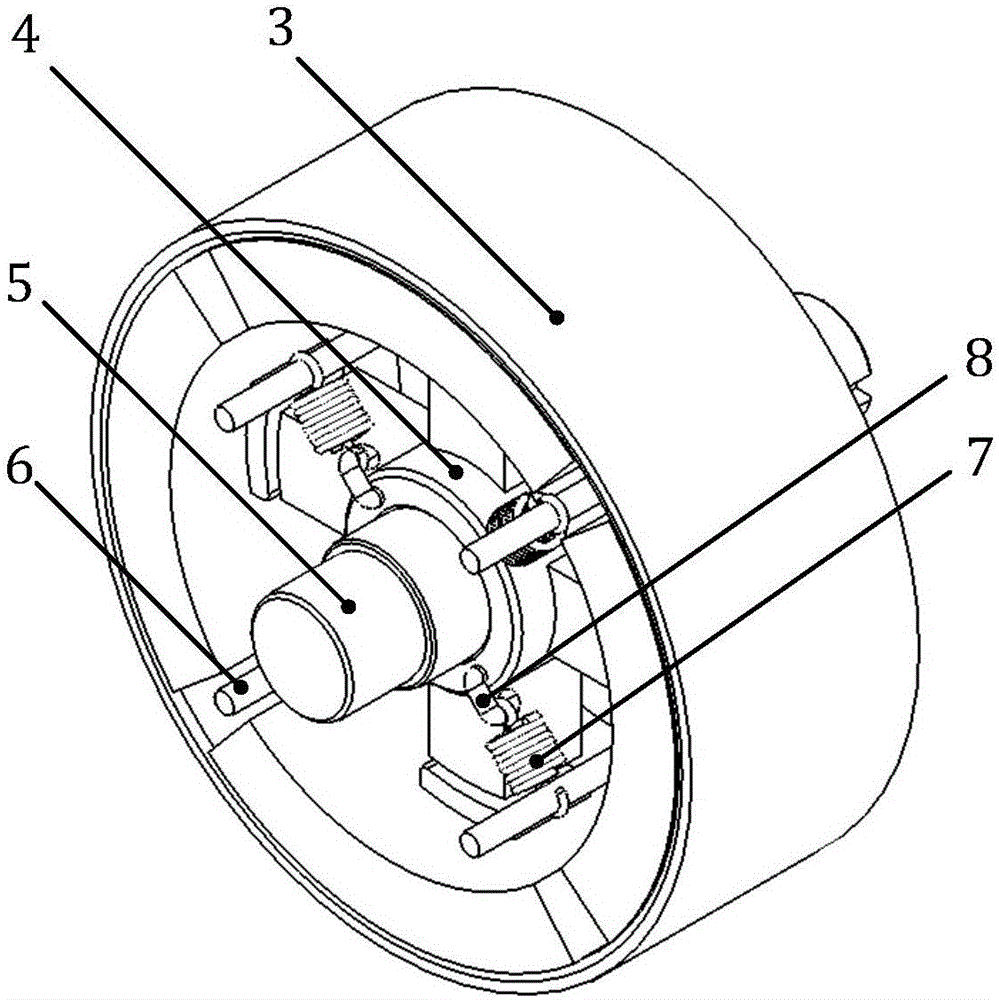
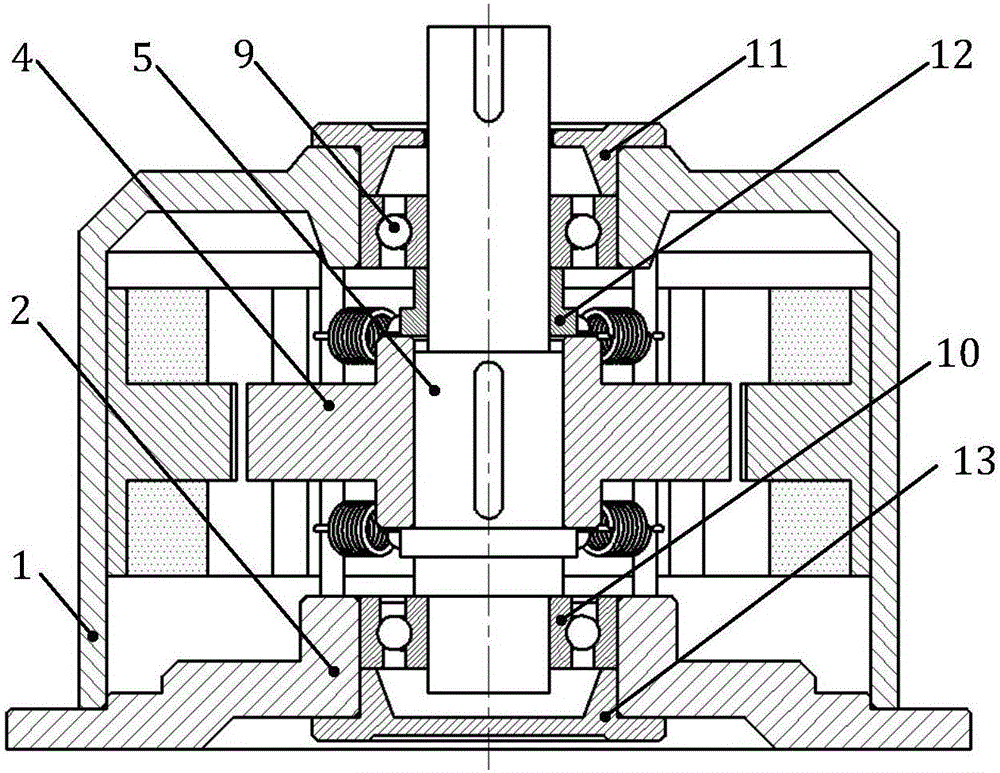
[0024] Such as figure 1 , figure 2 and image 3 As shown, this embodiment includes: an electromagnetic variable stiffness unit provided with an output shaft 5, a joint housing 1 and a base 2, wherein: the joint housing 1, the base 2 and the output shaft 5 are coaxially arranged, and the two ends of the output shaft 5 are respectively fixed with The first ball bearing 9 and the second ball bearing 10, the first ball bearing 9 is arranged in the joint housing 1, and the second ball bearing 10 is arranged in the base 2;
[0025] The electromagnetic variable stiffness unit includes a stator 3 and a rotor 4 coaxially arranged with the output shaft 5, wherein: the inner circumference of the stator 3 is uniformly distributed with four stator cores 301, and the stator core 301 is wound with a stator coil 302, and the rotor 4 Set in the stator 3, the four rotor cores 401 in the rotor 4 are arranged opposite to the stator core 301, the output shaft 5 and the rotor 4 are fixedly conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More