

Method for grabbing industrial waste by virtue of servo motor-driven variable-degree-of-freedom connecting bar mechanism
A servo motor and link mechanism technology, applied in the mechanical field, can solve the problems of needing to be installed at the joint position, high precision requirements, complex structure, etc., to achieve the effect of improving work efficiency, overcoming high precision requirements and low inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
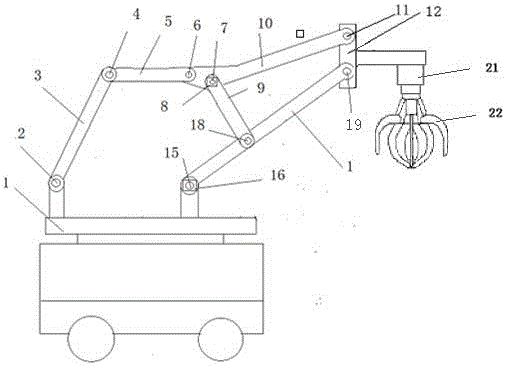
[0008] A method for grasping and loading industrial waste by using a servo motor-driven variable-degree-of-freedom link mechanism, which is characterized in that the variable-degree-of-freedom link mechanism driven by the servo motor includes a base 1, a large arm 17, and a wrist link pitching mechanism , a servo drive device, a first locking device 8, and a second locking device 16; the base 1 is installed on a movable slewing platform; the wrist link pitching mechanism is composed of a wrist link and a pitching mechanism, and the wrist The connecting rod is connected to the boom 17 through the coaxial ninth rotating pair 19 and the tenth rotating pair 20. One end of the active part 3 is connected to the base 1 through the first rotating pair 2, and the other end is connected to the first connecting rod 5 through the second rotating pair 4; the other end of the first connecting rod 5 is connected to the first connecting rod 5 through the third rotating pair 6 On the second co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More