

Flexible manipulator joint device with controllable damping and stiffness
A technology of flexible manipulators and rigidity, which is applied in manipulators, transmission devices, mechanical equipment, etc., can solve the problems of lack of human or environmental safety protection, and achieve the effect of compact structure, large stiffness adjustment range, and improved safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
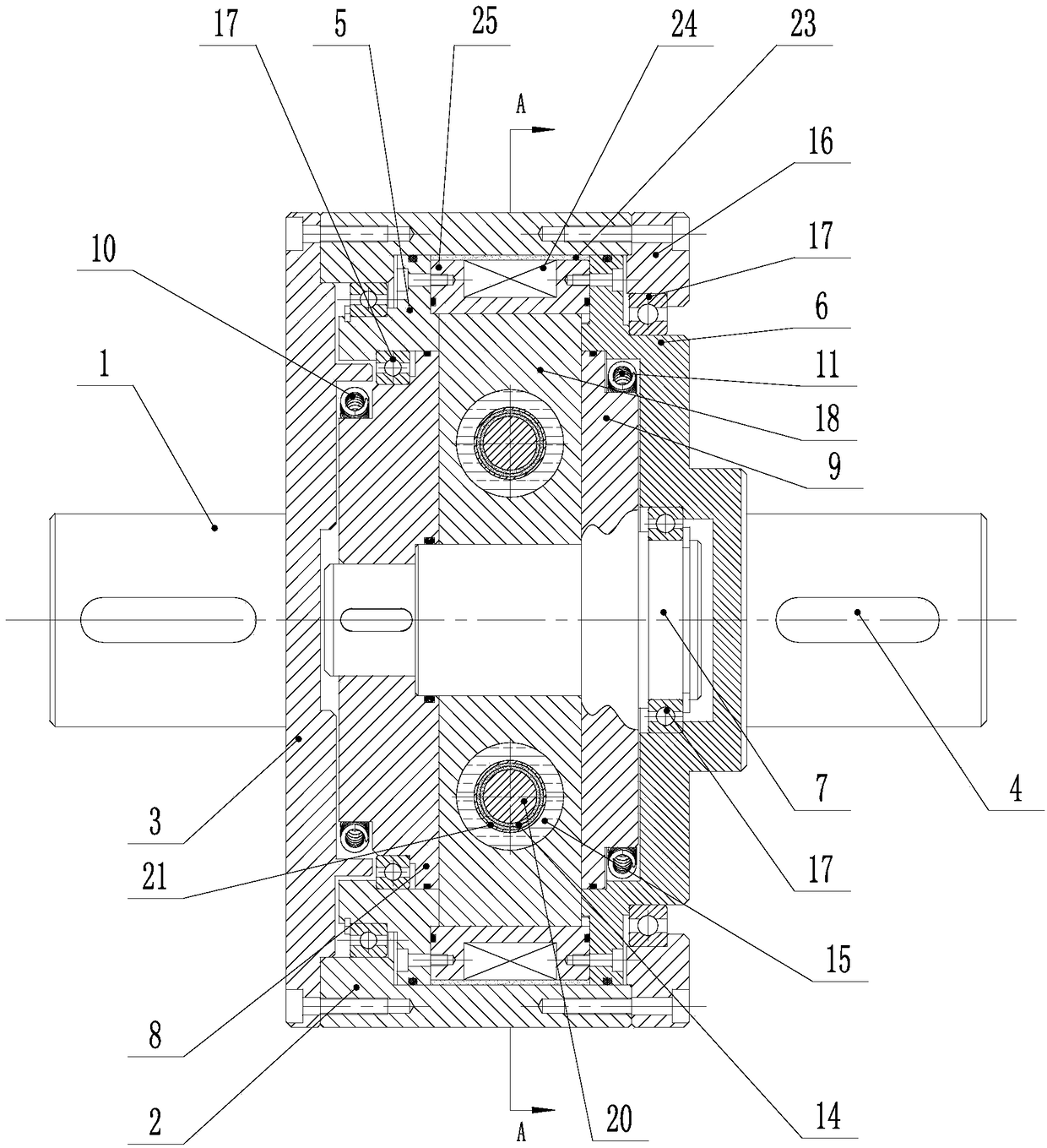
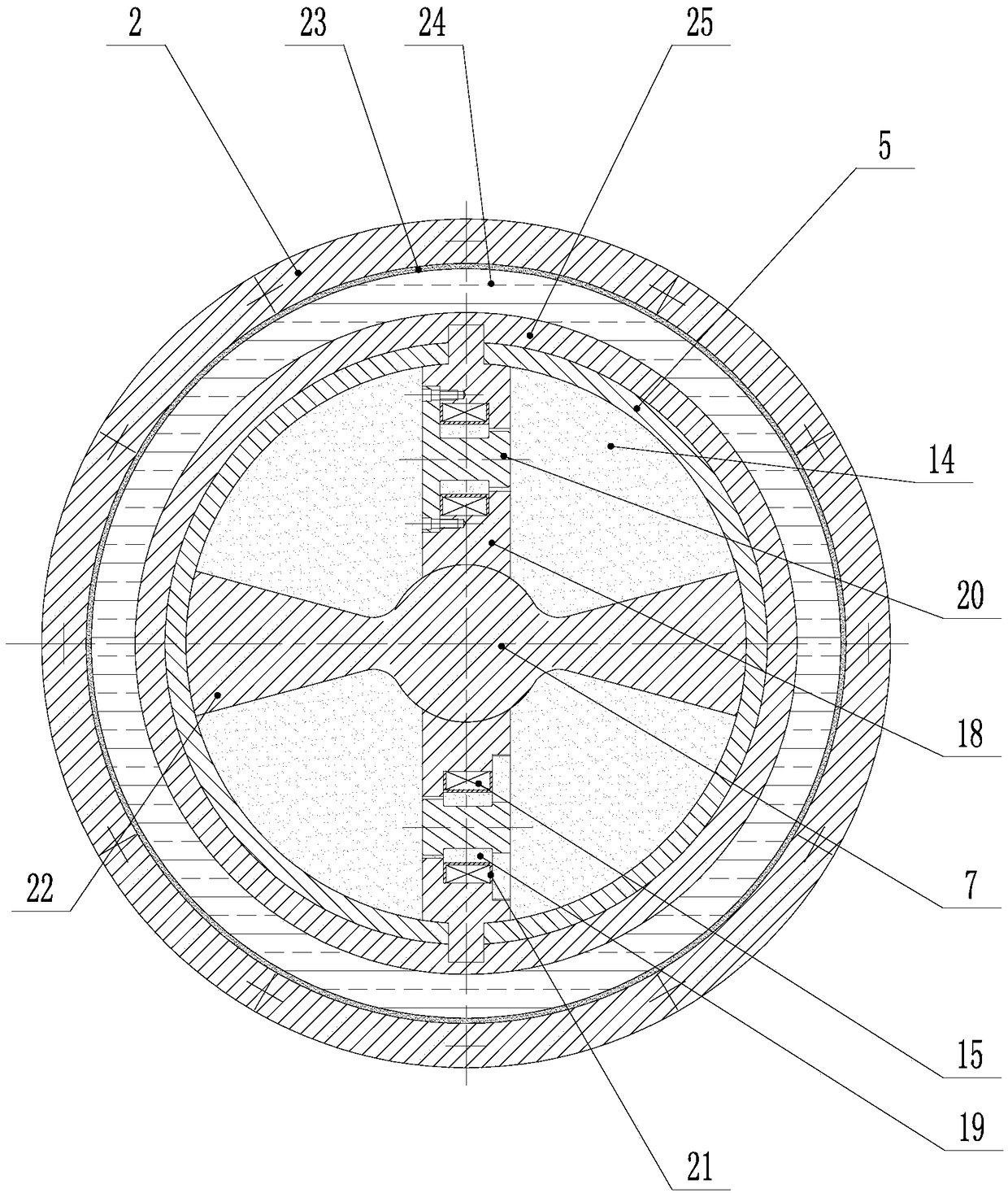
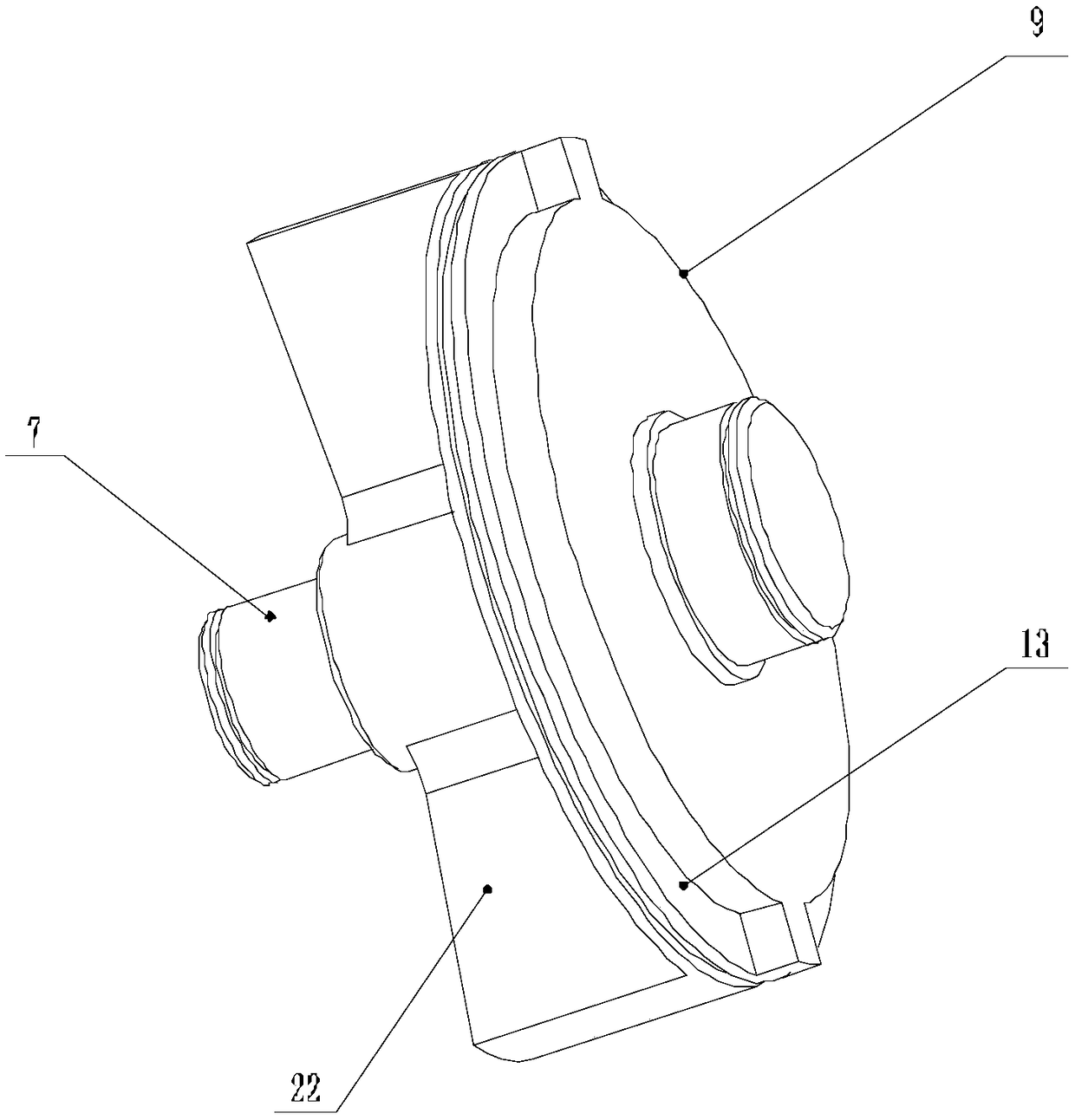
[0028] Such as Figure 1 to Figure 7 As shown: the flexible manipulator joint device with controllable damping and stiffness in this embodiment includes a rotation input assembly, an intermediate assembly, and a rotation output assembly that are sequentially connected by transmission; the transmission connection is connected by means of power transmission.
[0029] The rotary input assembly includes an input shaft 1 and an input cylinder 2 connected to the input shaft 1 and capable of rotating synchronously, the input shaft 1; the input shaft 1 is the power input end, specifically the input end of the rotational power; the input cylinder 2 is a cylinder shape, the axis of the input cylinder 2 coincides with the axis of the input shaft 1; the rear end of the input shaft 1 (with figure 1 The direction close to the left side is the front, and the direction close to the rear side is the rear) extending radially to form a first end cover 3 for cooperating with the front opening of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More