Hydrostatic driving movement gear shifting control method and system
A shift control, hydrostatic technology, applied in transmission control, components with teeth, belts/chains/gears, etc., can solve the problems of increasing total time, large engine load, overflow, etc., and achieve a simple and universal structure. , Reduce the shift time, the effect of smooth speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
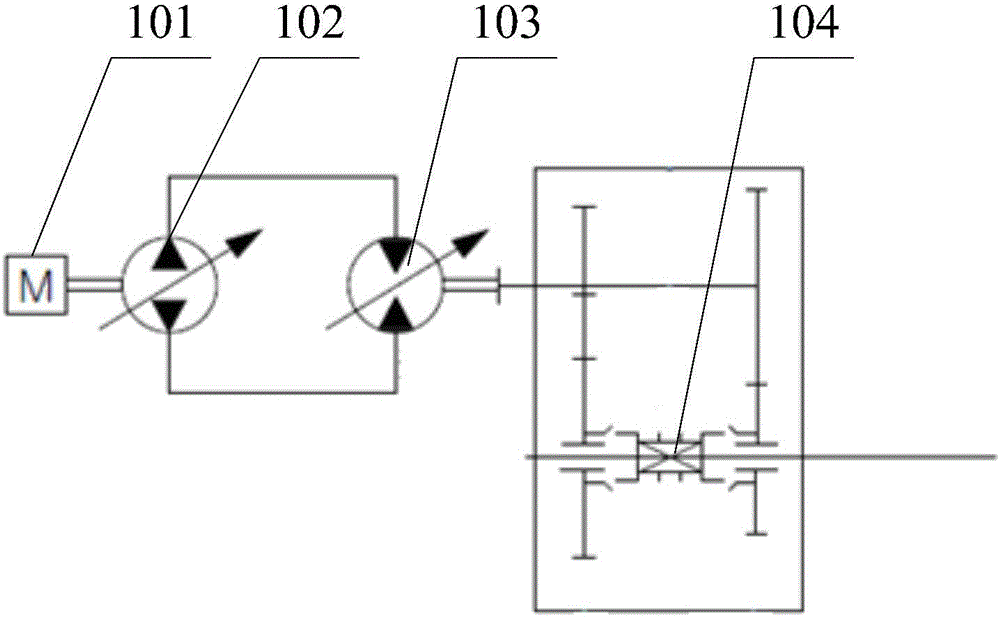
[0085] The core of the present invention is to provide a hydrostatic transmission mobile shift control method and system, so that a gearbox without a synchronizer can also realize shifting during travel, and at the same time, it is not necessary to adjust the displacement of the pump to 0, reducing the shifting speed. The total time required for the file.
[0086] Hereinafter, an embodiment will be described with reference to the drawings. In addition, the examples shown below do not limit the content of the invention described in the claims in any way. In addition, all the contents of the configurations shown in the following embodiments are not limited to be essential to the solution of the invention described in the claims.
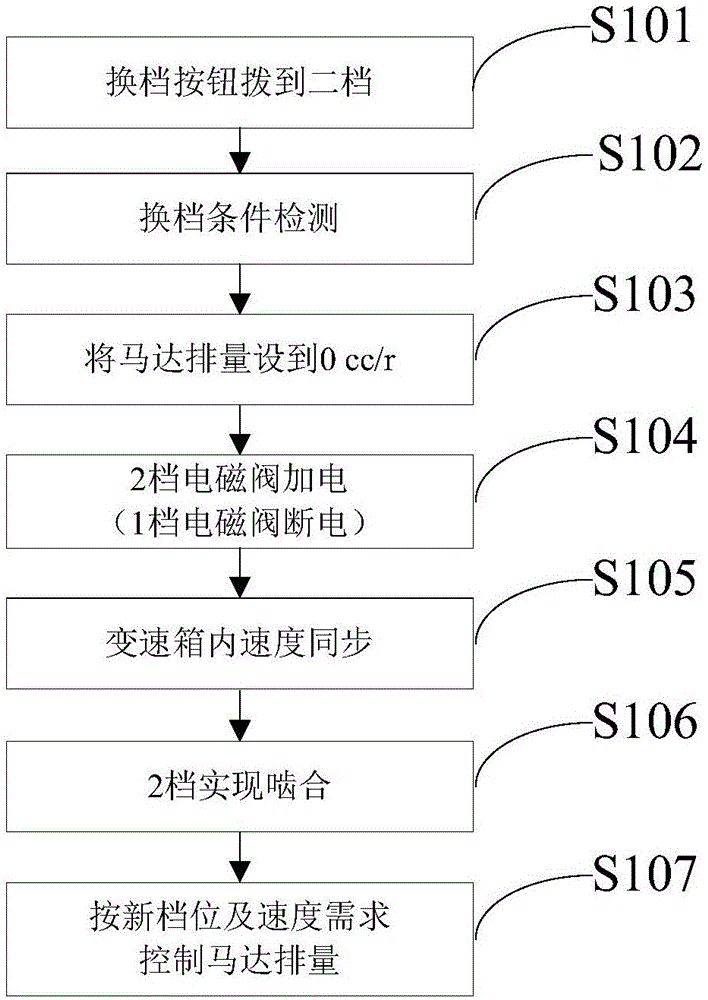
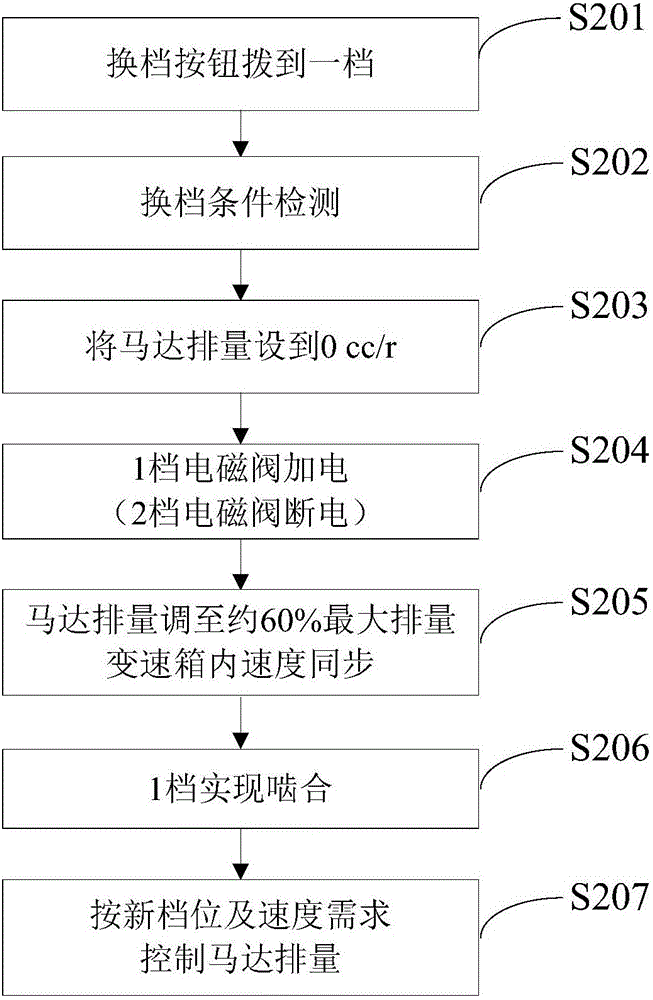
[0087] see Figure 5 , Figure 5 It is a flow chart of a method for controlling shifting of hydrostatic transmissions provided by an embodiment of the present invention.
[0088] The embodiment of the present invention discloses a hydrostatic trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



