

Method and system for identifying and positioning targets on basis of three-dimensional point cloud
A target recognition, 3D point cloud technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problems of not fully obtaining the 3D position and attitude information of the workpiece, limiting production efficiency, lack of versatility, etc., to achieve savings Development time, increased computing speed, and the effect of reducing the amount of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
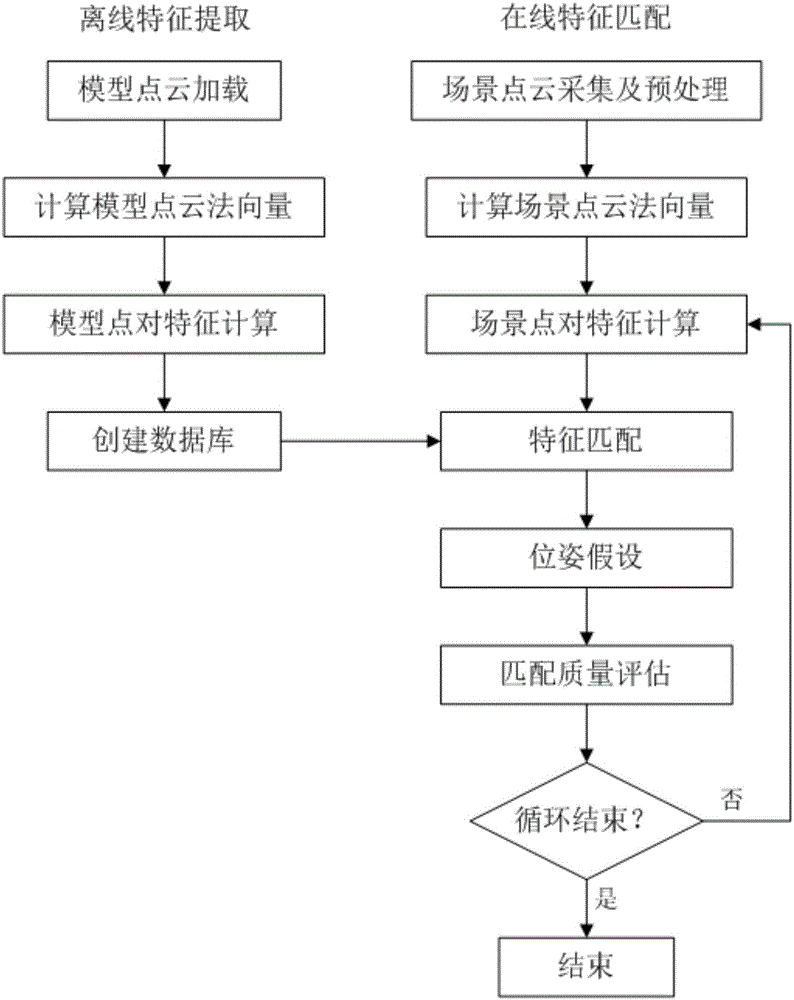
[0065] Such as figure 1 As shown, the present embodiment provides a method for target recognition and positioning based on a three-dimensional point cloud, including the following steps:
[0066] S1: Offline feature extraction, import workpiece model, calculate and create database.
[0067] The step S1 specifically includes the following steps:
[0068] S11: importing the model point cloud of the workpiece.
[0069] S12: Calculate the normal vector corresponding to each point in the model point cloud.
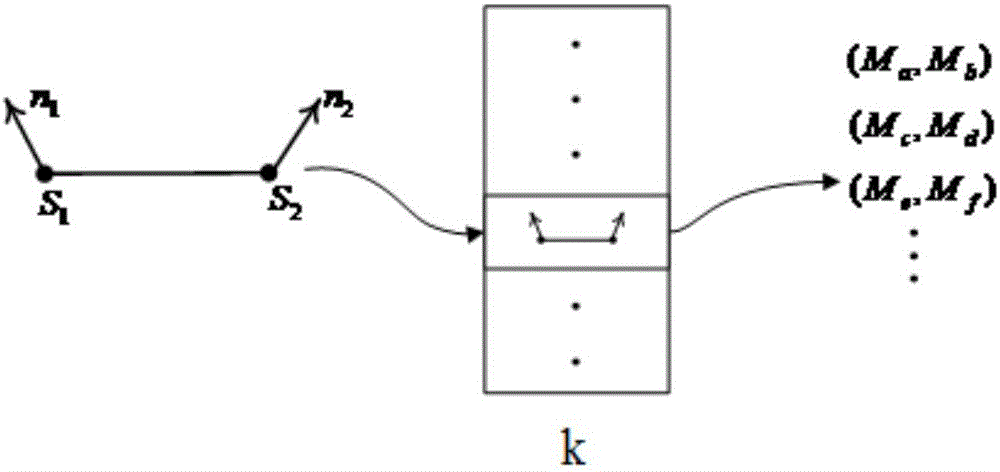
[0070] S13: Randomly select a model point pair in the model point cloud, and calculate a model point pair feature corresponding to the model point pair. The model point pair is composed of any two points in the model point cloud and their respective normal vectors.
[0071] S14: Repeat step S13 to obtain a certain number of model point pairs and their corresponding model point pair features in the model point cloud, and create a database using the obtained model point pairs...
Embodiment 2
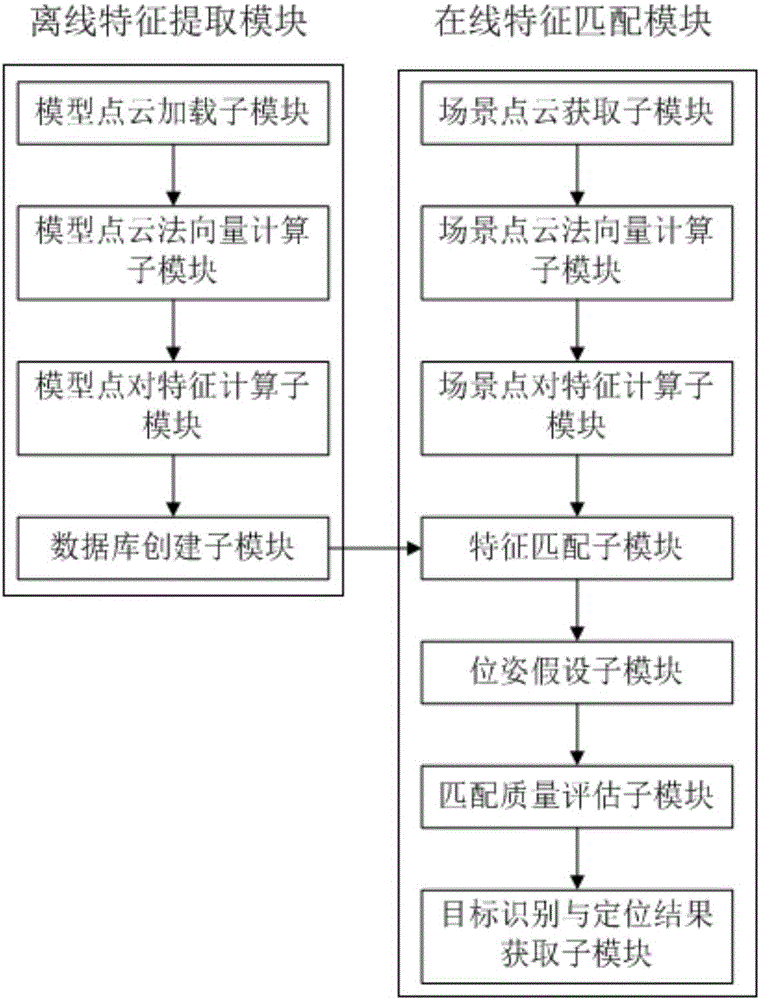
[0090] Such as image 3 As shown, the present embodiment provides a target recognition and positioning system based on 3D point cloud, including:
[0091] An offline feature extraction module, the offline feature extraction module is used to import the workpiece model, calculate and create a database.
[0092] An online feature matching module, the online feature matching module is used to obtain the final target recognition and positioning results.
[0093] The offline feature module specifically includes:
[0094] The model point cloud loading submodule is used to import the model point cloud of the workpiece.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More