

AGV (automated guided vehicle) real-time path planning method based on modified quantum ant colony algorithm
An ant colony algorithm and route planning technology, applied in the field of AGV real-time route planning based on the improved quantum ant colony algorithm, can solve real-time route planning problems and other problems, to improve the efficiency of cargo transportation, improve production efficiency, avoid conflicts and manpower wasteful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
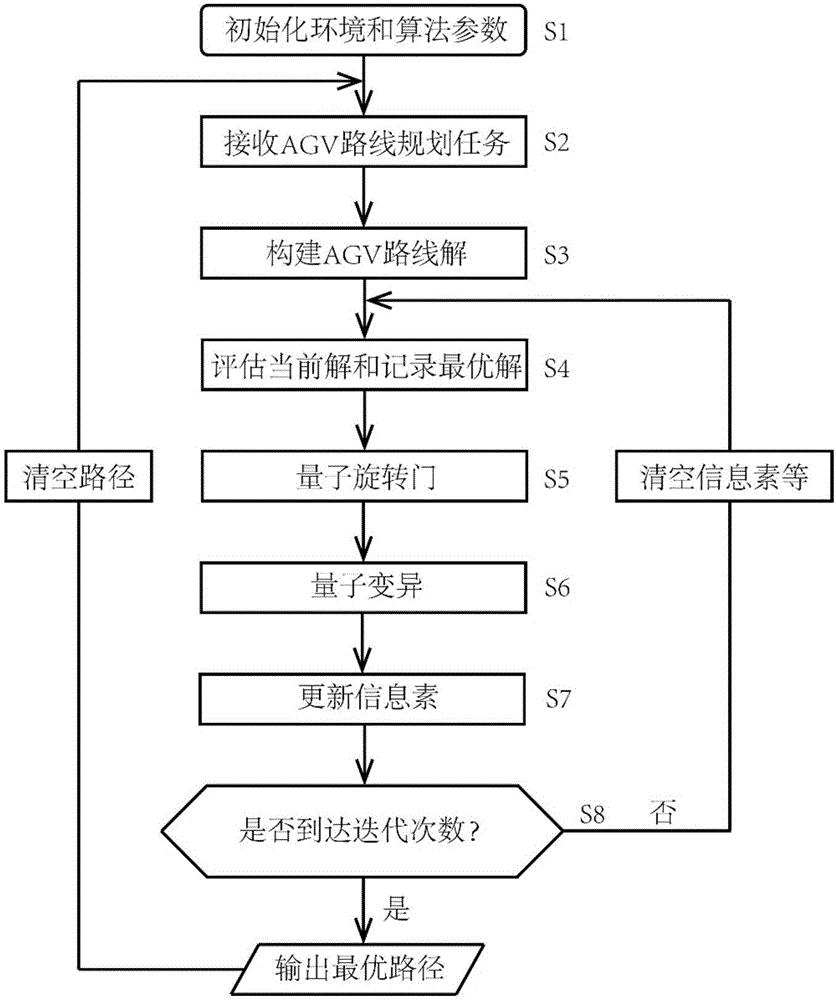
[0048] Such as figure 1 An AGV real-time route planning method based on the improved quantum ant colony algorithm disclosed in the first embodiment of the present invention is carried out according to the following steps:
[0049] S1. Initialize the environment and algorithm parameters, including:
[0050] S11. Initialization environment: give the point set of each intersection in the warehouse, the feasible arc set and the distance data between each intersection, specifically:
[0051] Define G=(V,E,D) as the environment map of the warehouse, where V={1,2,...,K} is the set of intersections in the environment, that is, the point set, E={(i,j)|i ,j∈V,i≠j} is the set of AGV feasible routes between intersections, that is, the set of feasible arcs, assuming there are M arcs in total, D={d ij |i,j∈V,i≠j} represents the distance of the arc set E;
[0052] Initialize algorithm parameters: define the number of ants N, the maximum number of iterations iter; initialize the M-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More