

A driving method based on a flexible knee joint exoskeleton device
A driving method and a technology of flexible joints, which are applied in the direction of appliances to help people walk, physical therapy, etc., can solve the problems affecting the accuracy of driving force and position control, and the complexity of the system, so as to achieve simple structure, simple calculation process, and convenient The effect of implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
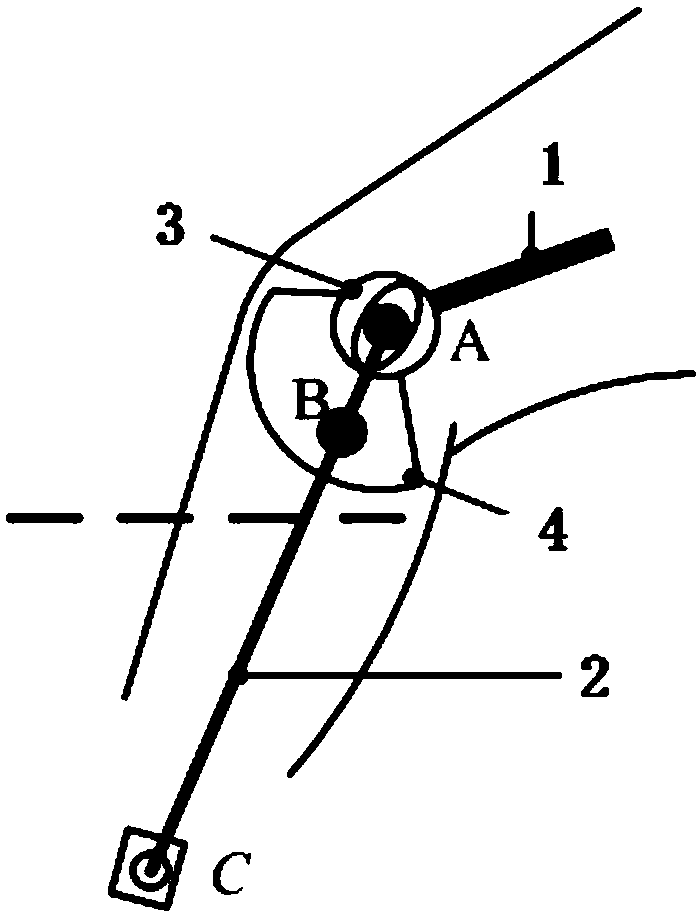
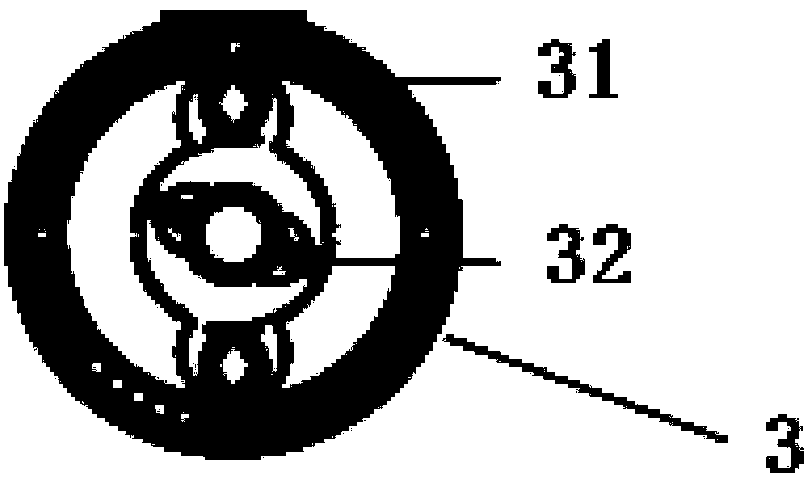
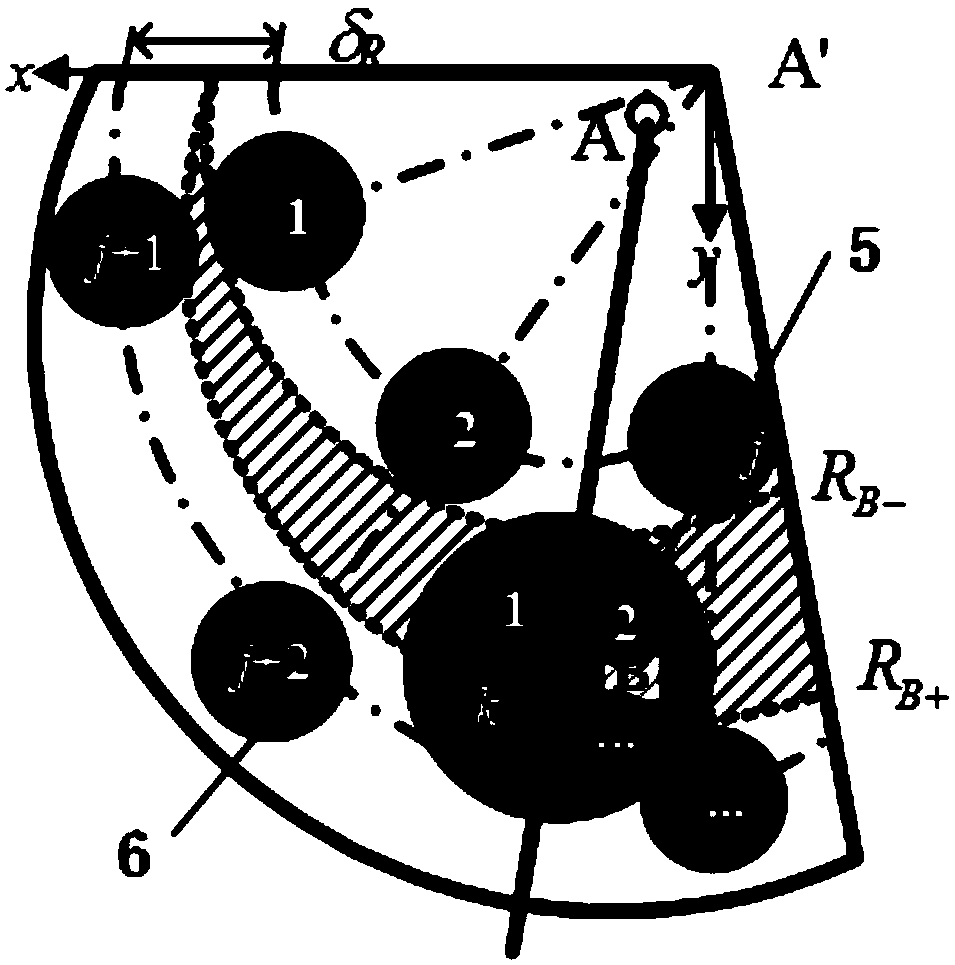
[0095] figure 1 It is a structural schematic diagram of the flexible knee exoskeleton of the present invention, the upper link 1 of the exoskeleton is fixedly connected with the human thigh, and the lower link 2 of the exoskeleton is connected with the human calf at point C (including a sliding pair and a rotating pair). The upper connecting rod 1 and the lower connecting rod 2 are connected together through a flexible joint structure 3. This flexible joint mechanism 3 includes two parts: an outer ring 31 and an inner ring 32, wherein the outer ring 31 is fixedly connected with the upper connecting rod 1, and the inner ring 32 and lower link 2 are fixed together. In the initial state, the centers of the inner ring 32 and the outer ring 31 are coincident. During the rotation, the centers of the inner ring 32 and the outer ring 31 may have a certain deviation. Therefore, point B on the lower link 2 can be figure 2 Movement in the shaded area shown, so that it can adapt to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More