

A stable motion control method for a hexapod robot
A hexapod robot, motion control technology, applied in the direction of program control manipulators, instruments, manipulators, etc., can solve the problems of not taking into account the impact, the deadlock of the fuselage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The present invention will be further described below in conjunction with the accompanying drawings.
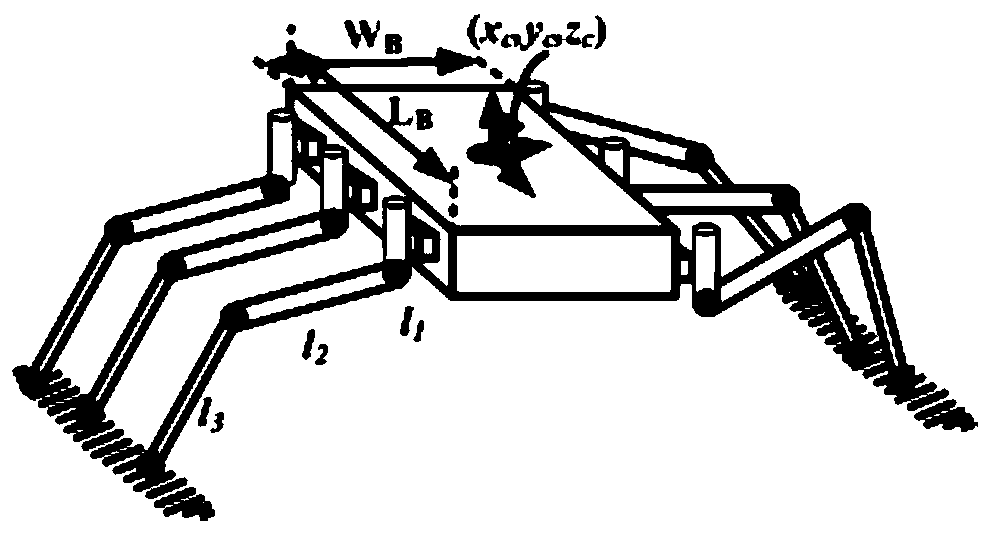
[0115] refer to Figure 1 to Figure 9 , a robot stable motion control method based on curve fitting modeling and multi-constraint foothold evaluation. Taking a hexapod robot as an example, the hexapod robot includes a hexapod robot body and six independent walking legs. The stable operation control method of the robot comprises the following steps:
[0116] Step 1: Fit the local environment of the swinging leg and foot based on the curve fitting algorithm, mainly including sensor position distribution, environment meshing, local environment point interpolation and quadratic curve fitting.
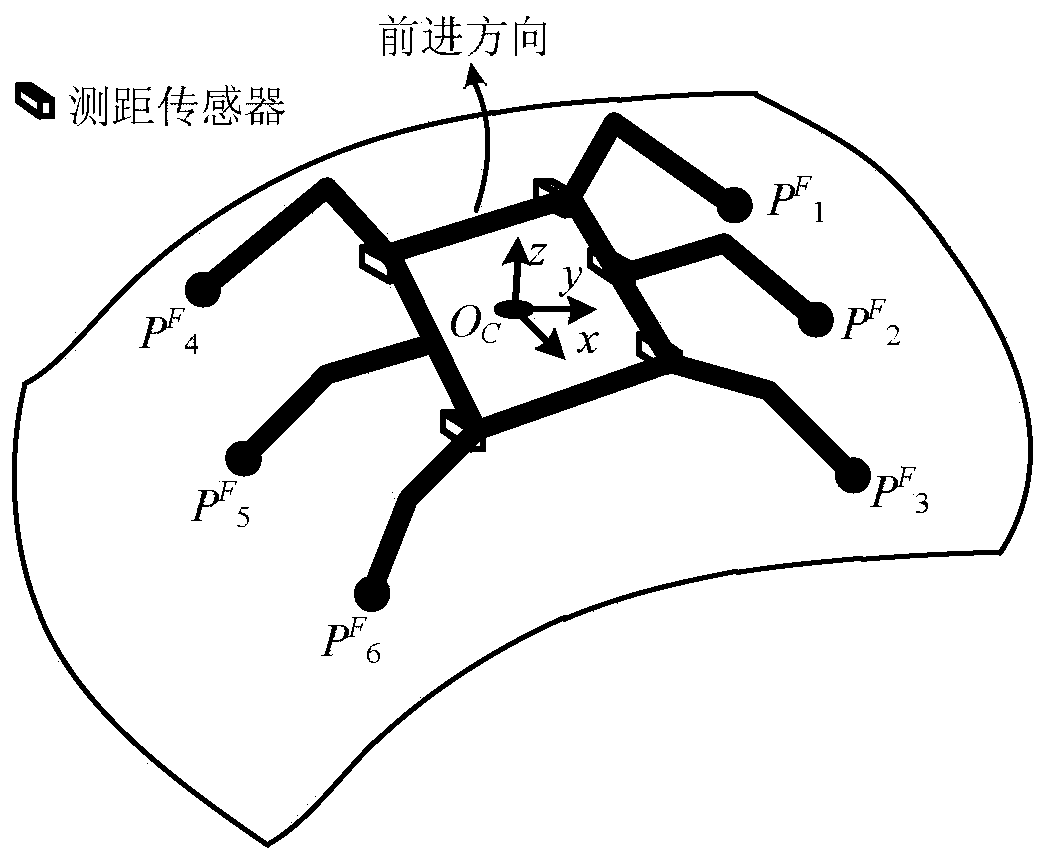
[0117] First, complete the position distribution of the ranging sensor, which is mainly distributed at the five root joints of the hexapod robot, such as figure 2 shown. Second, mesh the local environment, using P i S [i=0,1,2,3,4] to represent the five vertical projection poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More