

Vehicle body stability control method and system based on estimation of road adhesion coefficient
A technology of road surface adhesion coefficient and body stability, applied in the direction of brakes, etc., can solve problems such as large errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
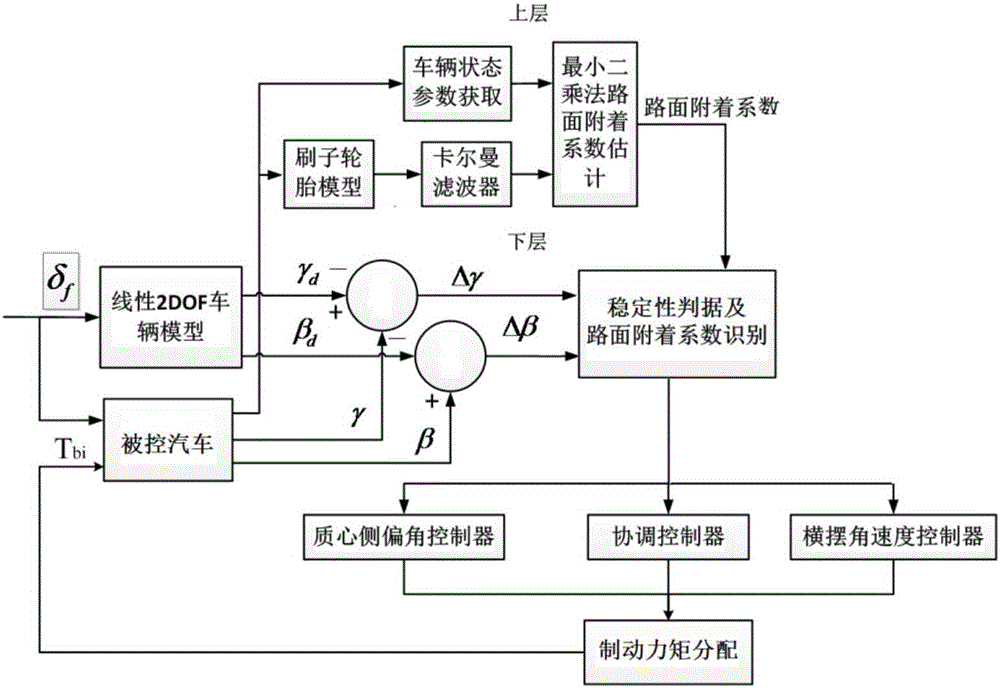
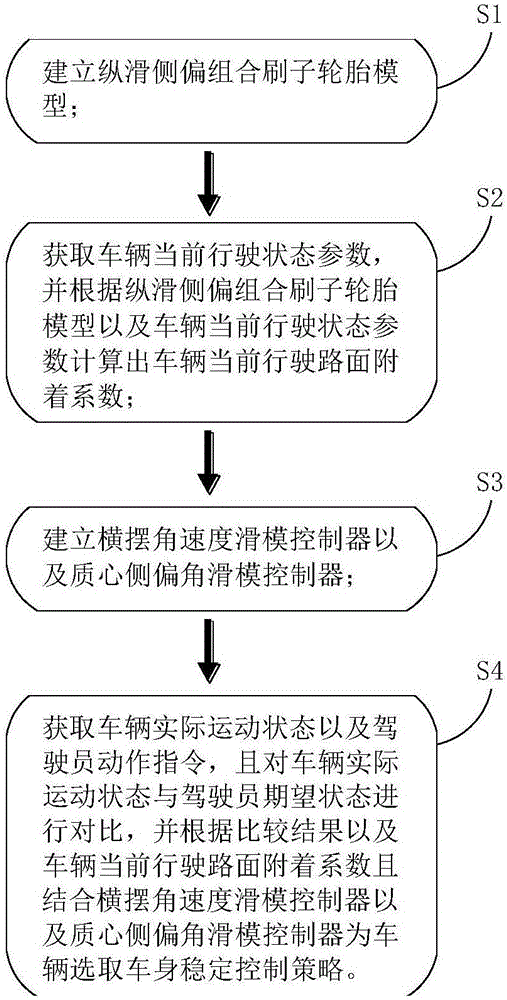
[0169] refer to figure 1 , figure 2 , the vehicle body stability control method based on road surface adhesion coefficient estimation proposed by the present invention, comprises the following steps:
[0170] S1. Establishing a longitudinal sliding and lateral deviation combination brush tire model;
[0171] The combination brush tire model of longitudinal sliding and side slipping is:
[0172]
[0173]
[0174] in,
[0175]
[0176] Preferably, use the Kalman filter method to F x and F y make an estimate;
[0177] Among them, C x is the vertical sliding stiffness of the tire, C α is the tire cornering stiffness, α is the tire slip angle, μ is the road adhesion coefficient, λ is the actual longitudinal slip rate of the wheel, r is the rolling radius of the wheel, v ω is the longitudinal velocity at the center of the wheel, F x is the tire longitudinal force, F y is the tire lateral force, F z is the tire vertical force;
[0178] The nonlinear format of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More