

Surveying and mapping, pesticide spraying and monitoring combination work method and system of unmanned aerial vehicles
A joint operation and drone technology, applied in the field of drones, can solve problems such as the inability to achieve high-efficiency and automatic spraying, and achieve the effects of reducing manpower consumption, shortening surveying and mapping time, and improving spraying efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] Example of the joint operation method of UAV surveying, spraying and monitoring:
[0030] The joint operation method of UAV surveying and mapping, spraying and monitoring in this embodiment is mainly used in the field of agriculture, especially planting and forestry. The method in this embodiment is implemented on the working ground with a certain range.
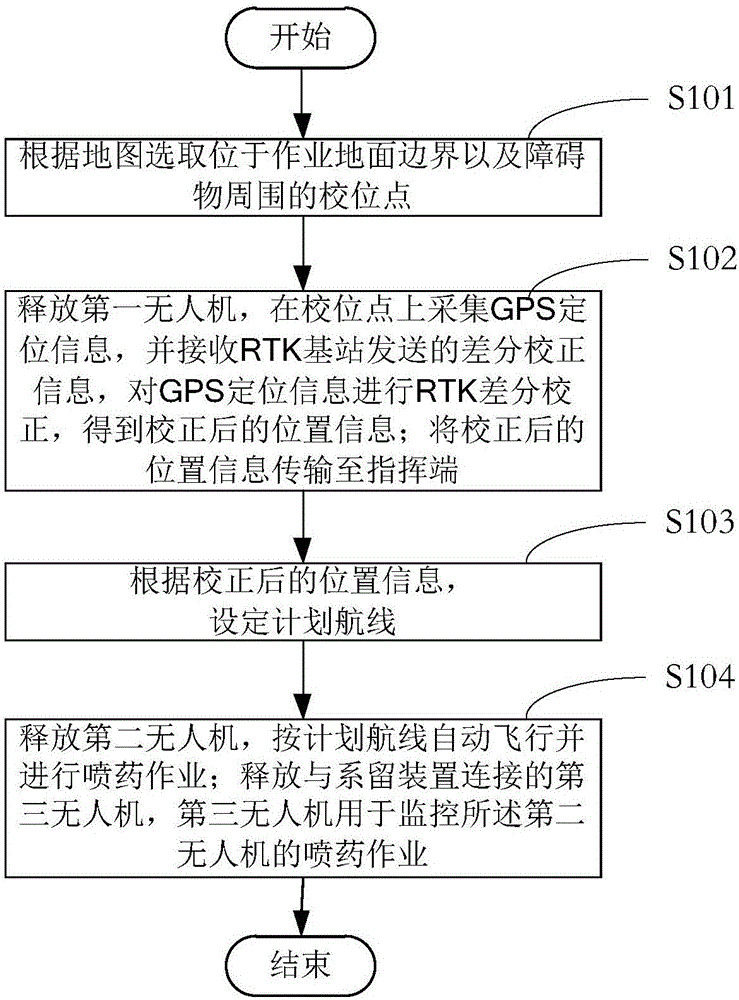
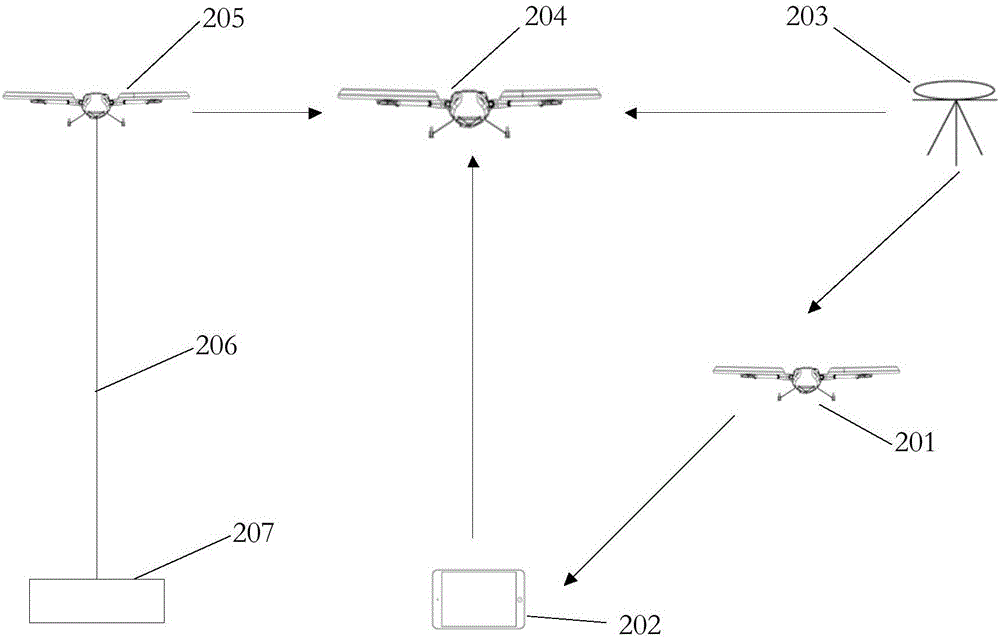
[0031] Combine below figure 1 and figure 2 Introduce the workflow of this embodiment.
[0032] First, step S101 is executed to select calibration points around the working ground boundary and obstacles according to the map.
[0033] In step S101, according to the information of the existing electronic map, a calibration point is selected at the boundary of the operation ground to limit the flight range. For example, for a rectangular working ground, you can select the four vertices of the rectangle as the calibration points; for an irregularly shaped working ground, you can select multiple vertices of the shape a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More