

Ornamental tree and shrub transplanting robot
A technology of tree transplanting and robotics, applied in the direction of transplanting machinery, planting methods, applications, etc., can solve the problems of low efficiency and low efficiency of manual transplanting, and achieve the effect of increasing work efficiency and reducing labor resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
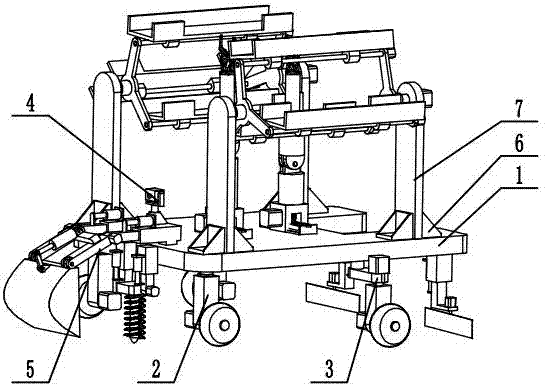
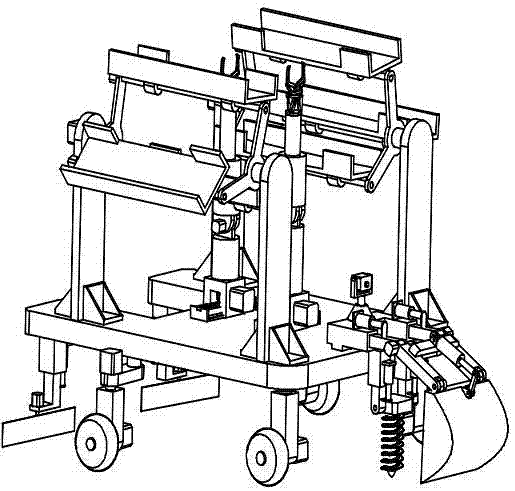
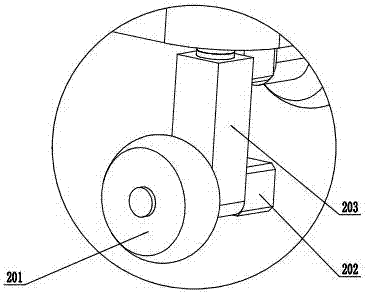
[0021] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10As shown, a garden tree transplanting robot includes a platform 1, two front drive structures 2, two rear drive structures 3, a camera group 4, a digging device 5, eight connecting corner pieces 6, four fixing frames 7, Two motor bases 8, six tree storage baskets 9, four turntables 10, six first servo motors 11, two second servo motors 12, six rotating shafts 13, a first fixed rod 14, a third servo motor 15, The first electric cylinder 16, the second fixed rod 17, the fourth servo motor 18, the second electric cylinder 19, the front fixed plate 20, twelve fifth electric cylinders 21, the rear fixed plate 22, the mechanical claw fixed frame 23, the mechanical Claw 24, four sixth electric cylinders 25, first telescopic sleeve 26, fifth servo motor 27, scraper 28, seventh electric cylinder 29, first telescopic rod 30, slide rail 31, rack 32, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More