Operating lever for remote control of urologic surgery
A remote control and urology technology, applied in the direction of surgical robots, etc., can solve the problems of poor pertinence, complex structure and operation process of remote operation devices, and high cost of use and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] An operating rod for remote control of urological surgery, including a bracket mechanism, a joystick mechanism, a yaw detection mechanism, a pitch detection mechanism, a rotation detection mechanism, a tool feed detection mechanism and a tool feed control mechanism, wherein,
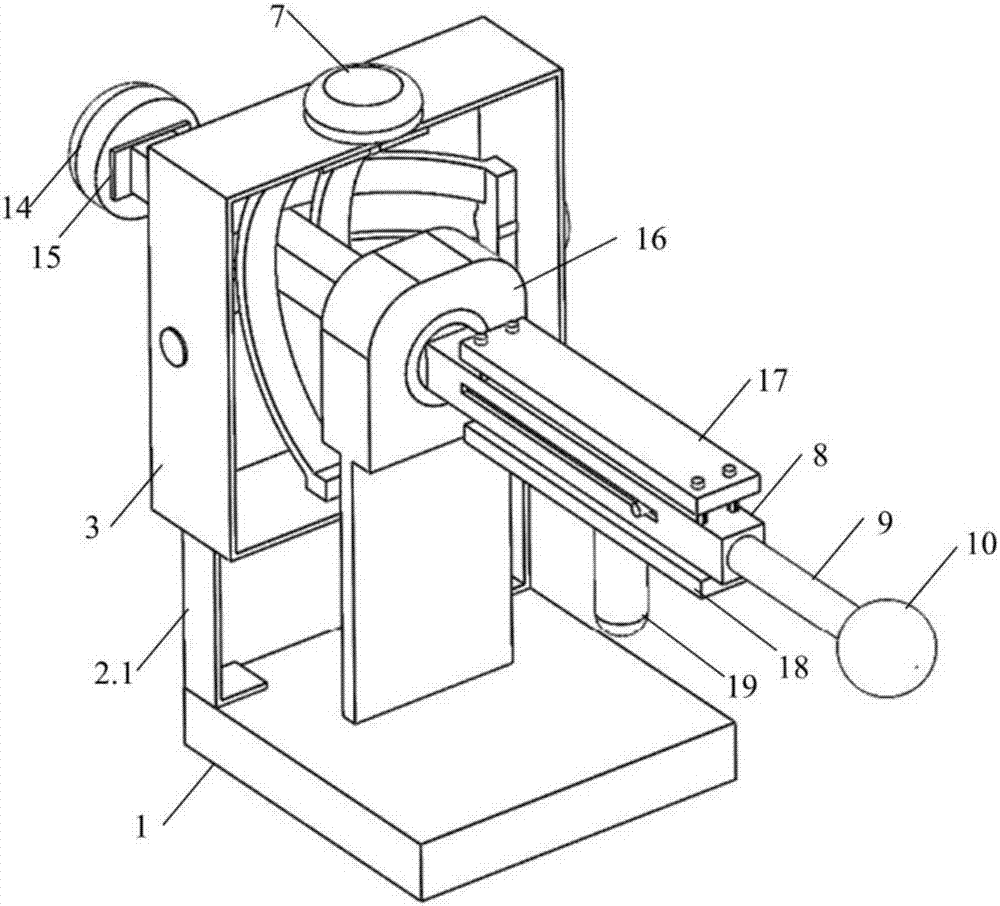
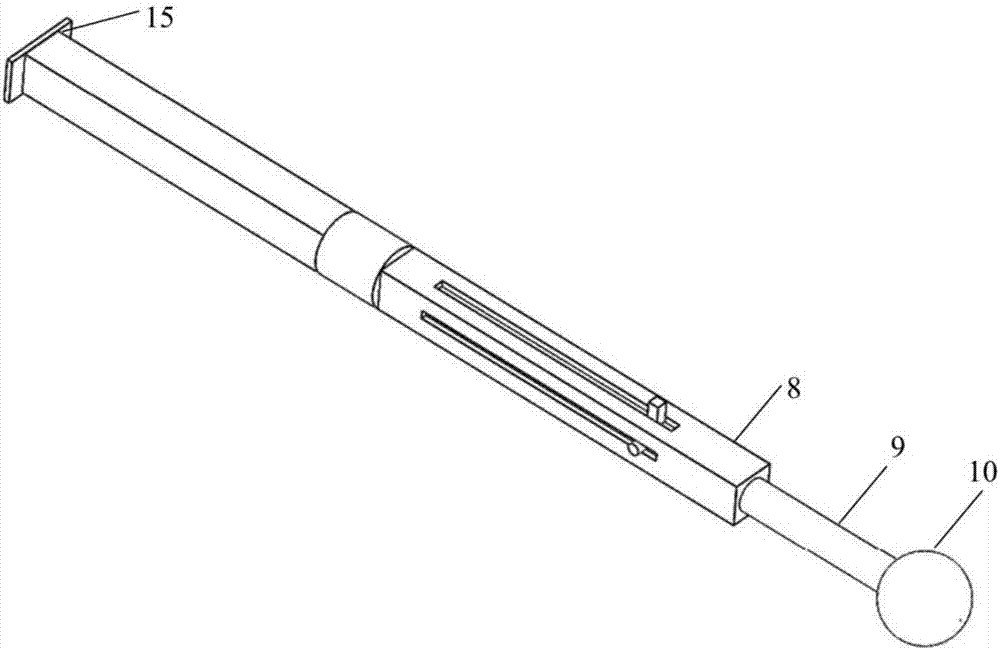
[0041] The support mechanism comprises a base 1, a square support 3, a ball bearing seat 16 and a hollow rod 8, wherein the square support 3 is fixedly connected to the base 1 and its opening faces the horizontal direction; the ball bearing seat 16 is fixed on the base 1; the hollow rod 8 The front end is provided with an end cover 15, which passes through the ball bearing installed in the ball bearing seat 16 and the square bracket 3, and the inner ring of the ball bearing is tightly sleeved on the middle section of the hollow rod 8;
[0042] The joystick mechanism comprises a main operating rod 11, a sleeve pipe 9, a slide rod 12 and a return spring 13, wherein the main operating rod 11, the retu...
Embodiment 2
[0052] An operating rod for remote control of urological surgery based on Embodiment 1, wherein the main operating rod 11 is a stepped cylindrical shape with a small diameter in the rear section, and a boss is formed between the front and rear sections; the sleeve The inner diameter and outer diameter of 9 are respectively the same as the diameter of the rear section and the front section of the main operating rod 11; the front end of the sleeve 9 abuts against the boss. In this case, the boss is the limiting component provided on the main operating rod 11 . The setting of the stepped cylindrical shape can make the casing 9 fit on the main operating tube and cooperate with the front section of the main operating rod 11 to form a uniform front and rear, so that the casing 9 can enter the hollow rod 8, expanding the size of the casing. 9 range of activities.
[0053] Wherein, in a feasible implementation mode, thin grooves are arranged in the axial direction on the upper, lower...
Embodiment 3
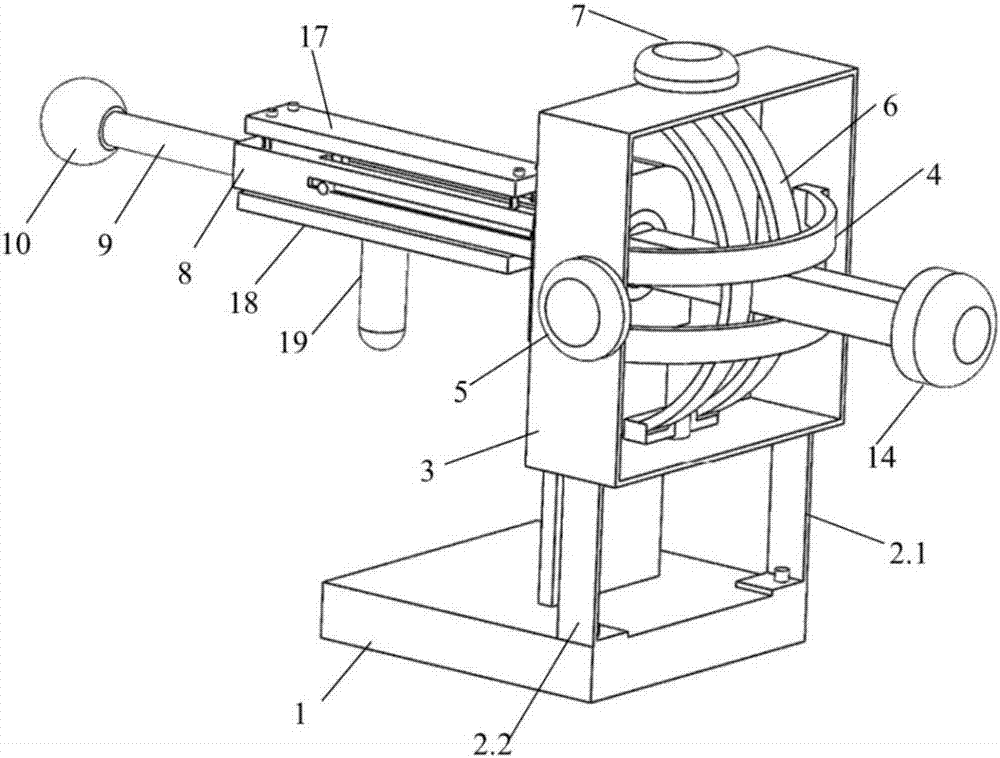
[0058] like figure 1 , figure 2 As shown, the operating rod for remote control of urological surgery provided by the present invention includes a base 1 and a device fixed on the base 1 for simulating the movement rules of surgical instruments. Base 1 upper surface side is fixed with support leg 2.1 and support leg 2.2, middle part is fixed with ball bearing seat 16, and support leg 2.1 and support leg 2.2 upper end are jointly connected with the lower side of square support 3 with opening towards horizontal direction. The four sides of the square bracket 3 are equal in length and the opening faces the horizontal direction. A yaw arc shaft 6 is installed between the symmetrical positions of the upper and lower sides. The two ends of the yaw arc shaft 6 pass through the upper and lower sides of the square bracket 3 respectively. Constitute revolving pair, deflection arc shaft 6 upper end extension shafts are connected with deflection potentiometer 7 turning handles, and defle...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap