

Track-leg and foot hybrid mobile robot
A mobile robot and composite technology, applied in the field of mobile robots, can solve the problems of inability to travel, difficulty in travel, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
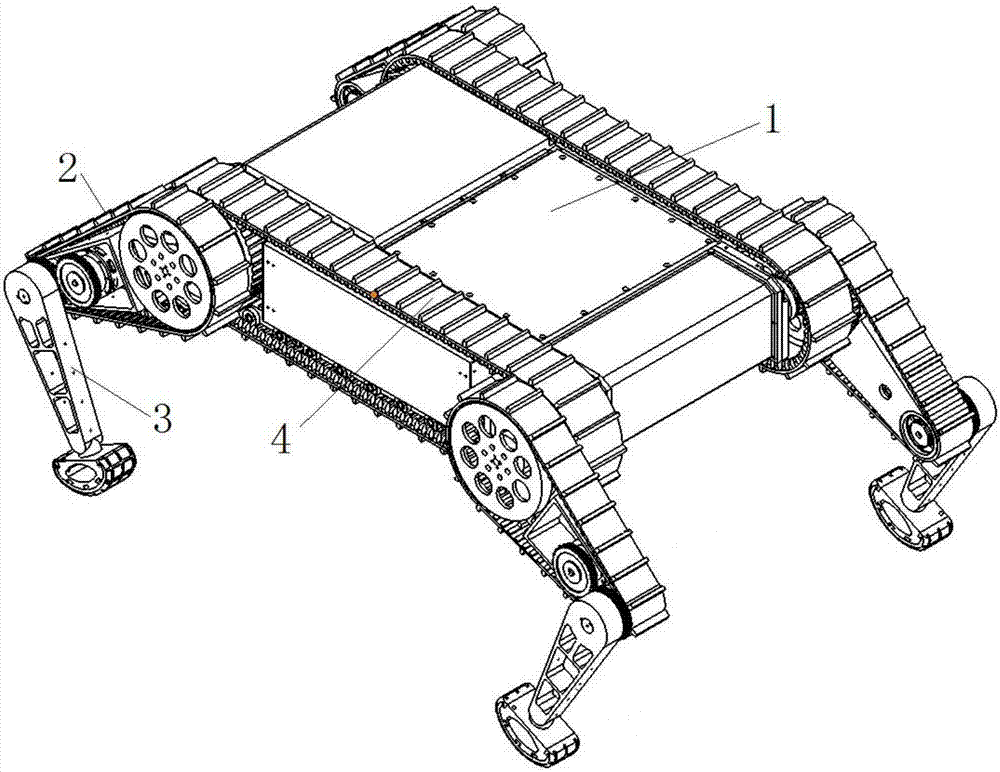
[0016] Such as figure 1 As shown, the crawler-leg-foot compound mobile robot of the present invention includes a crawler walking unit 1, and a thigh auxiliary obstacle-crossing unit 2 is installed on both sides of the front part and the rear part of the crawler walking unit 1, and each thigh assists A shank auxiliary obstacle-surmounting unit 3 is connected to the obstacle-surmounting unit 2 .
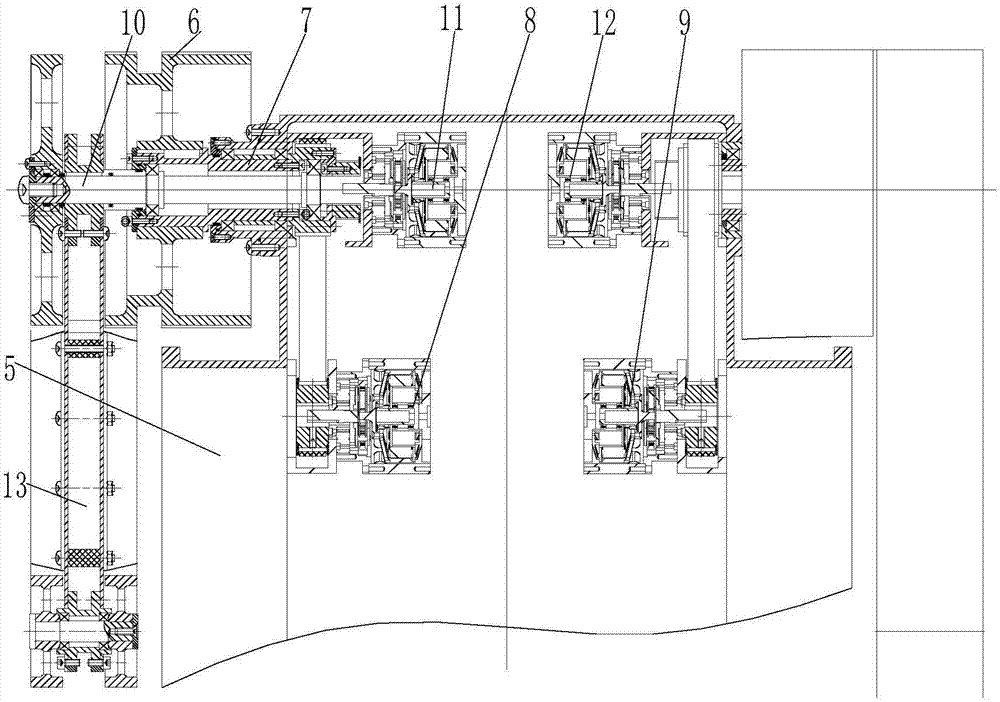
[0017] The crawler walking unit 1 can adopt various existing crawler-type mobile robots, such as CN101780817A disclosed "Coal Mine Underground Dangerous Area Detection Robot Platform". The walking unit of "Coal Mine Underground Dangerous Area Detection Robot Platform" is as follows: figure 2 As shown, including the front drive wheel 6 and the rear wheel (not shown in the figure), the two front drive wheels 6 are installed on the two front wheel hollow shafts 7 respectively, and the two front wheel hollow shafts 7 are respectively arranged on the positive pressure housing Both sides ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More