

Method for robot to initiatively search and position smell source
A robot and odor source technology, applied in the field of robotics, can solve the problems of no method for determining the odor source, low search efficiency, slow search speed, etc., and achieve practicality and robustness, wide range of activities, and improved efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
[0029] The invention provides a method for a robot to actively search for and locate an odor source (see Figure 1-3 , referred to as method), is characterized in that comprising the following steps:
[0030] Step 1, design the omnidirectional mobile robot (referred to as robot) used in the method for searching and locating the odor source:
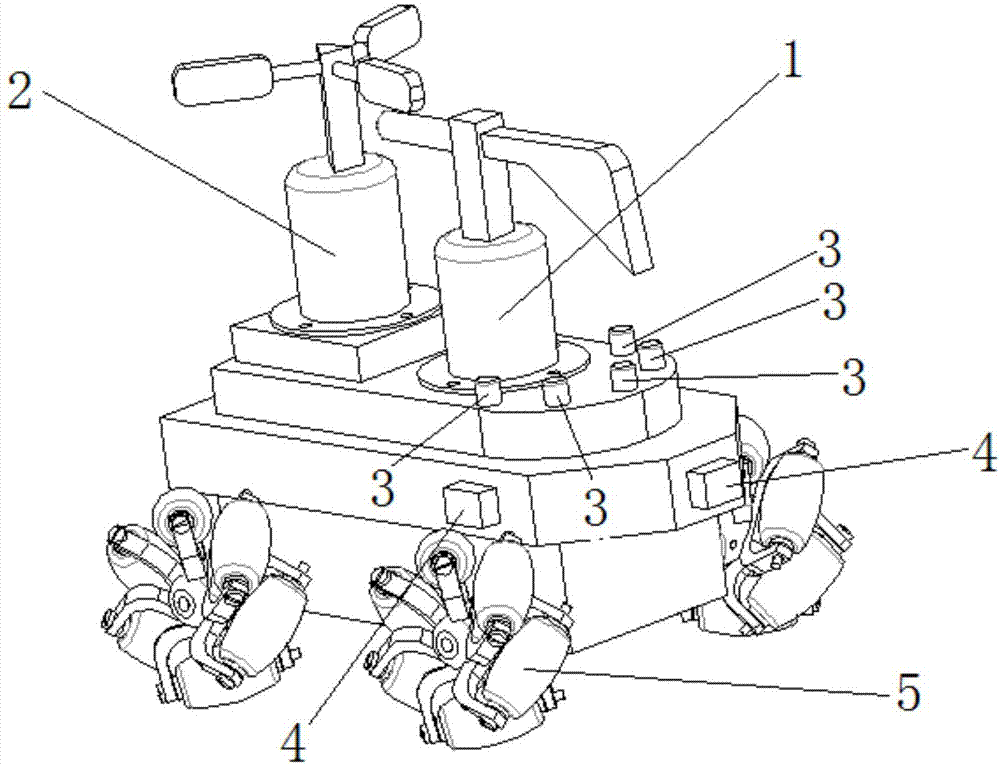
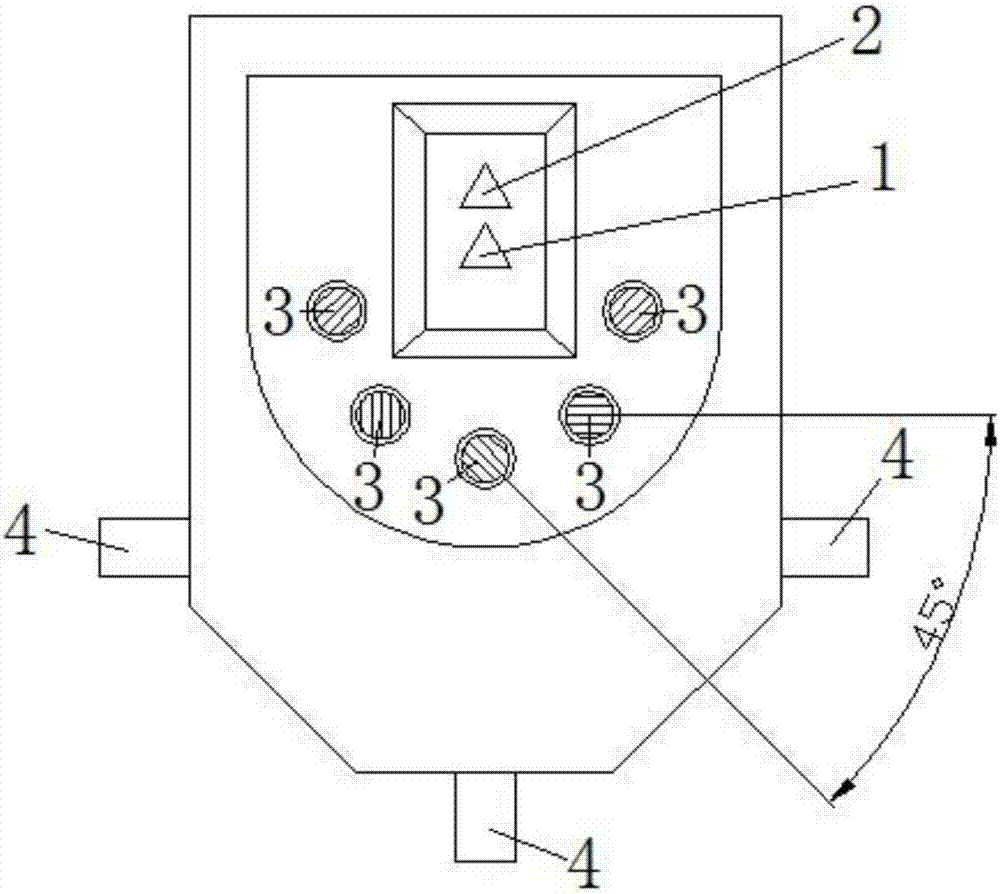
[0031] The robot adopts a wheeled structure, and selects a mecanum wheel 5 with omnidirectional movement function; five gas sensors 3 are installed on the front of the robot, and the five gas sensors 3 are distributed in a semicircle, and two adjacent gas sensors The included angle between the sensors 3 is 45°, and one of the gas sensors 3 is located directly in front of the robot to detect the concent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More