

Traveling robot adapted to seabed environment
A walking robot and robot technology, applied in the field of marine equipment, can solve the problems of limited seabed detection tools and scarcity of automated large-scale continuous detection tools, achieve good task adaptability, improve the detection range of the seabed environment, and have strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing.
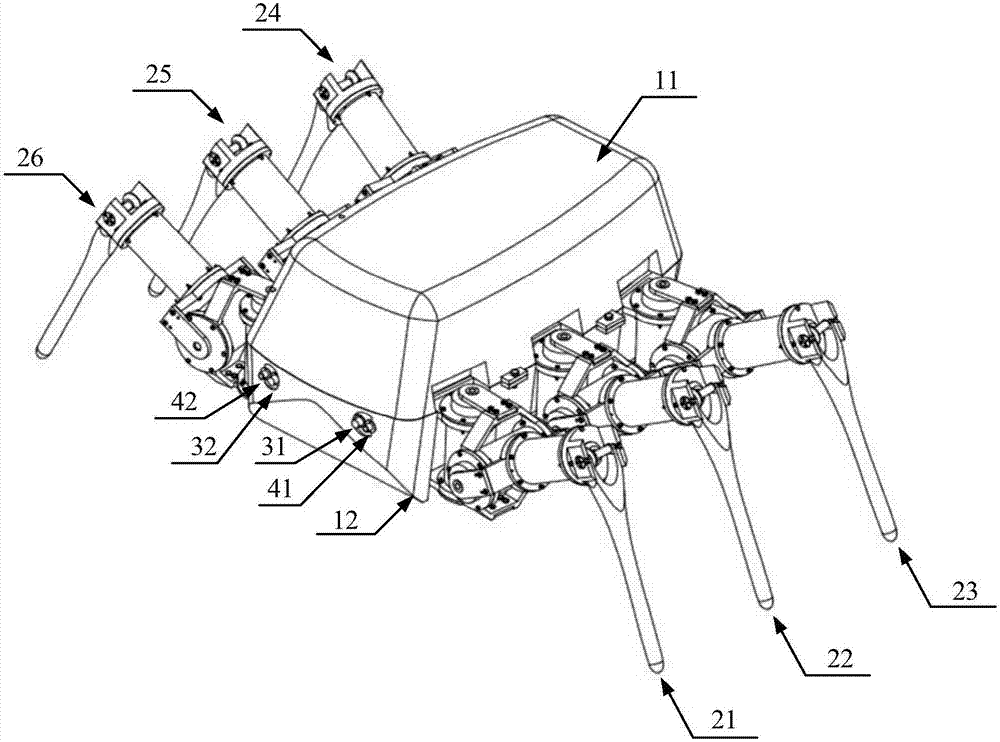
[0027] Such as figure 1 As shown, a walking robot suitable for the seabed environment includes a robot body, a robot leg group, a vision system, a lighting system, and a power supply and control system.
[0028] Robot body is made up of body upper shell 11 and body lower shell 12, is connected by bolt between the body upper shell 11 and the body lower shell 12.
[0029] The robot leg group includes six robot legs: the first robot leg 21, the second robot leg 22, the third robot leg 23, the fourth robot leg 24, the fifth robot leg 25, the sixth robot leg 26, The structure of each robot leg is the same, and the robot legs are symmetrically distributed on both sides of the robot body, and the robot legs and the robot body are fixed by bolts.
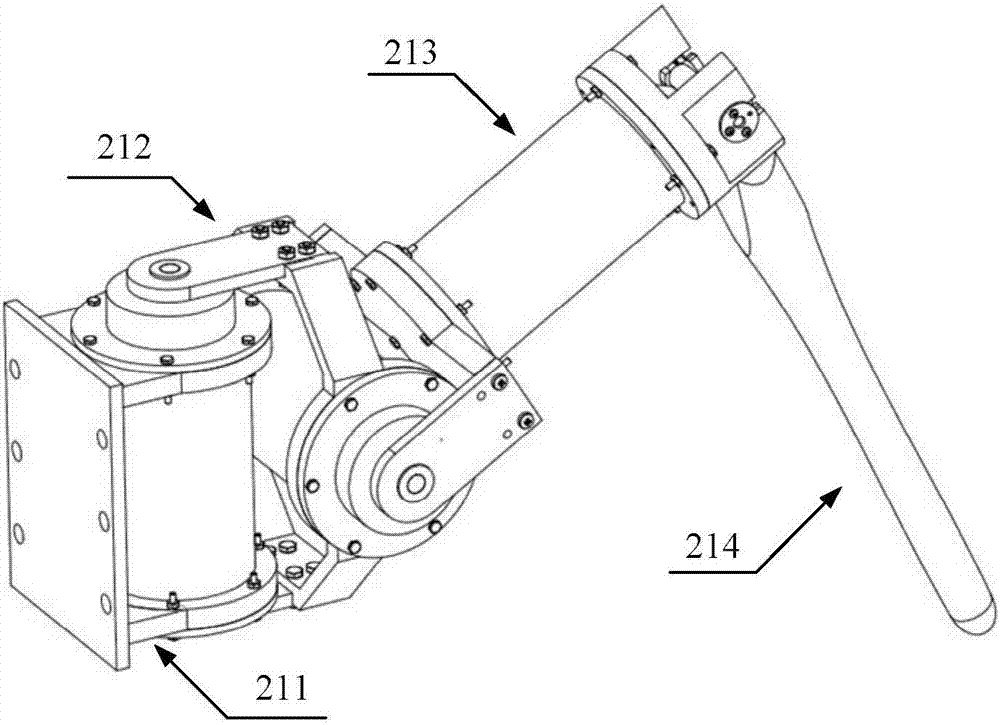
[0030] Such as image 3 As shown, the first robot leg 21 is taken as an example for illustration. The first robot leg 21 is composed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More