

Control method for dispersion S-shaped curve speed of mechanical arm
A speed control and manipulator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor smooth speed control and poor synchronization, and achieve the effect of smooth speed control, precise speed synchronization, and reduction of calculation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
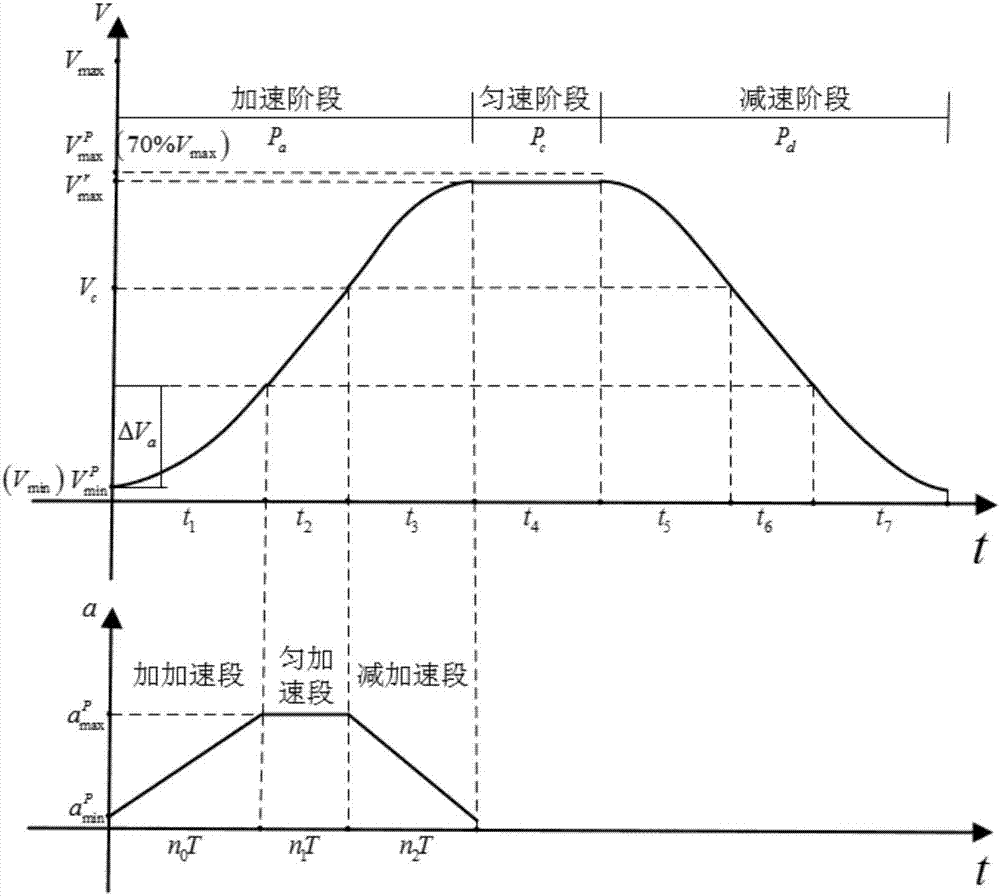
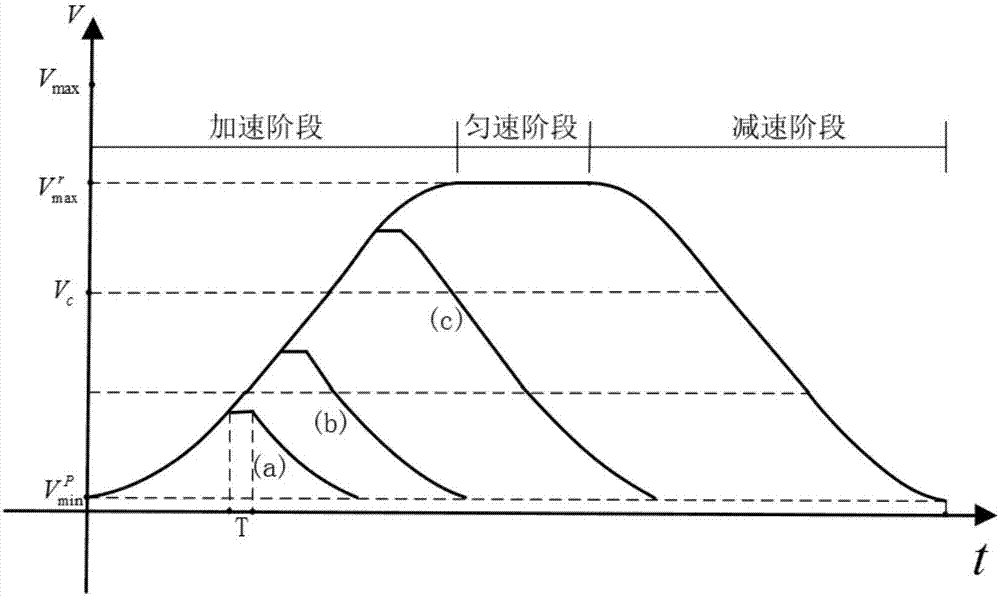
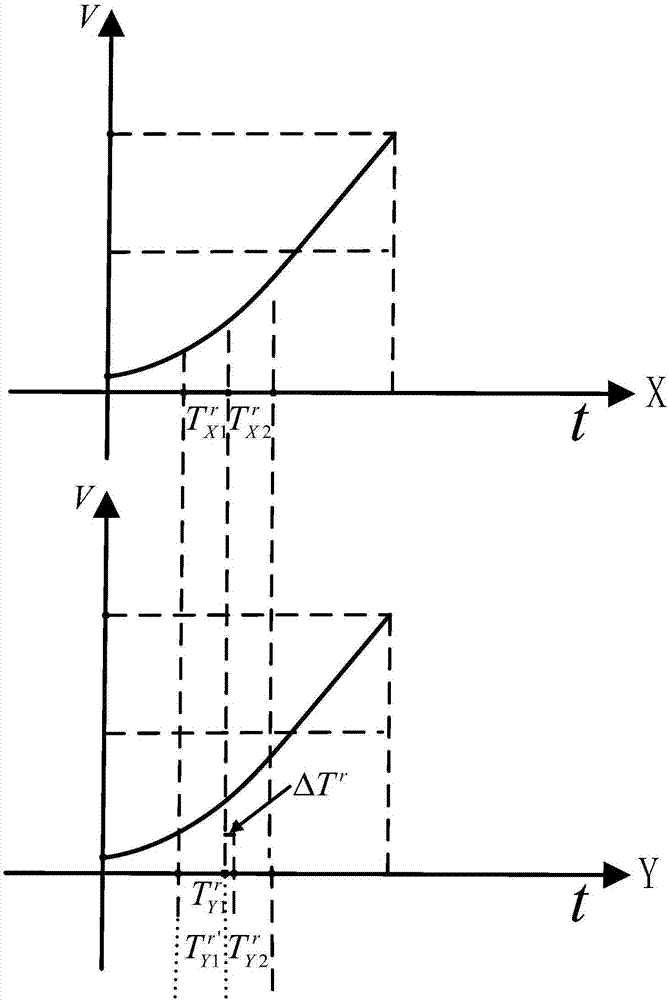
[0025] refer to Figure 1 ~ Figure 3 , a discrete S-curve speed control method of a manipulator, said method comprising the following steps:
[0026] 1) Divide the running speed of the manipulator into several speed segments, and determine the minimum speed value of the current speed segment Maximum speed value Minimum acceleration maximum acceleration and jerk J P ;
[0027] The operating speed range of the manipulator is V min ~V max , the corresponding controller can adjust the speed range from 1% to 100%. Divide the speed into 10 sections: 1%~10, 11%~20%, ..., 81%~90%, 91%~100%, then the minimum speed value of each section Maximum speed value Corresponding range: 1%~10V max , 11%~20%V max ,...,81%~90%V max ,91%~100%V max , figure 1 Set the minimum speed value of the current speed segment in The maximum speed is Then, S-shaped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More