

GNSS/INS/vehicle integrated navigation method for agricultural machinery operation
A vehicle combination and navigation method technology, applied in the field of automatic U-turn path planning and control, can solve the problems of low IMU requirements, low cost, poor navigation accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The present invention will be further explained below in conjunction with the drawings.
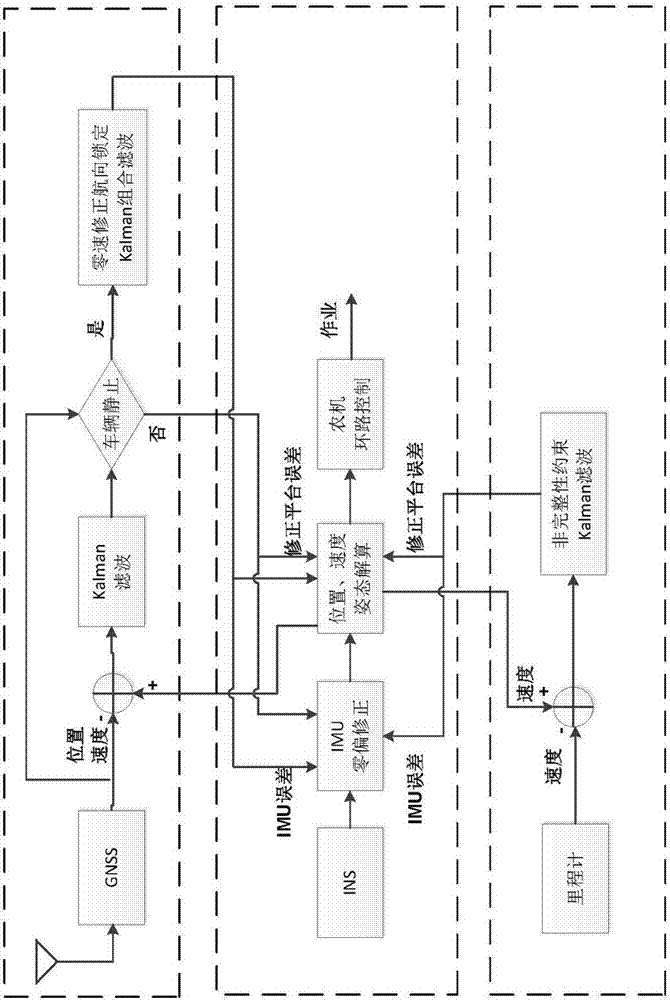
[0115] Such as Figure 1~4 The shown GNSS / INS / vehicle integrated navigation method for agricultural machinery operations specifically includes the following steps:
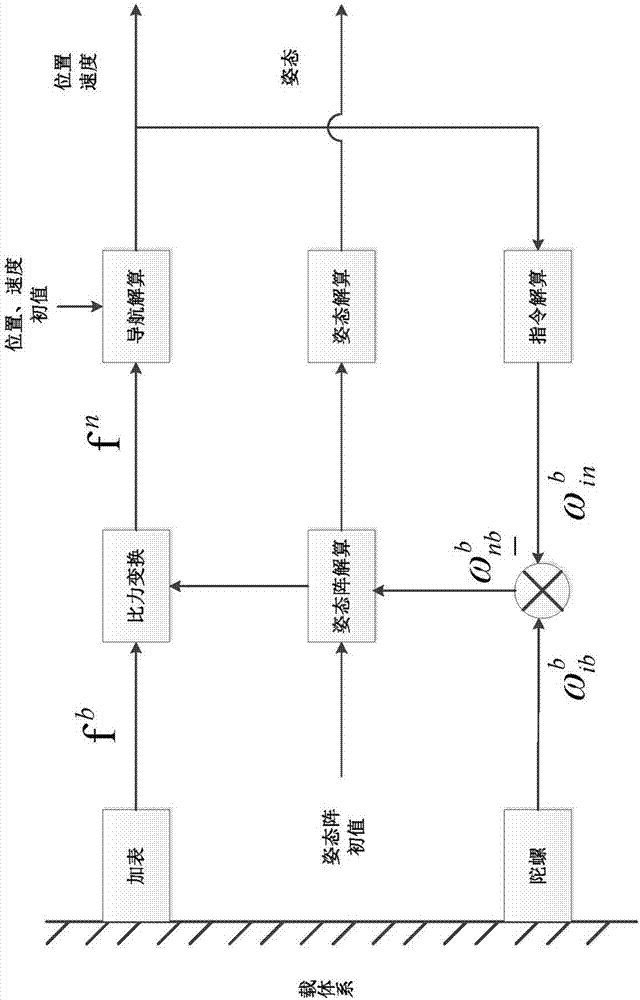
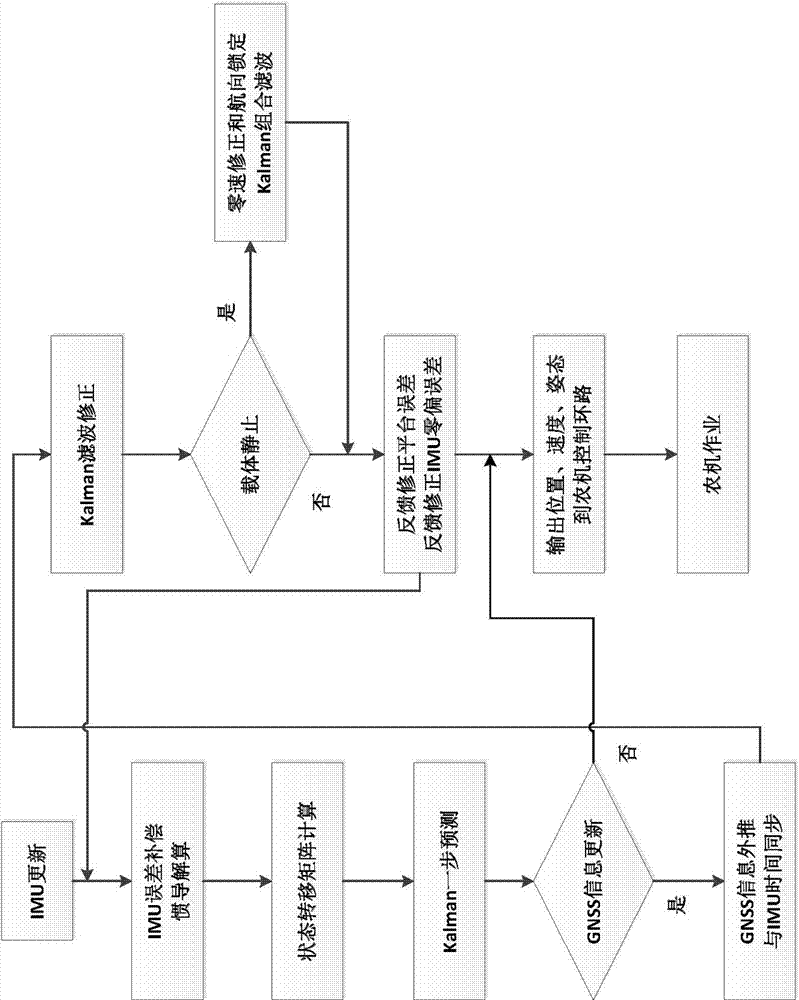
[0116] Step 1 (INS solution): After the zero offset correction of the inertial measurement unit, the inertial navigation solution is performed by the INS calculation unit, and the state transition matrix is calculated through Kalman filtering, and the state is predicted by Kalman filtering according to the state transition matrix. Covariance matrix
[0117] Step 2 (Combined navigation of GNSS and INS): Determine whether the GNSS information has been updated. If the GNSS information is updated, the GNSS information extrapolation is synchronized with the time of the IMU (Inertial Navigation Measurement Unit), and the position and velocity difference between the inertial navigation and the GNSS is used as observation Kalman ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More