Five-degree-of-freedom magnetic suspension switched reluctance motor system and control method thereof
A technology of switched reluctance motors and reluctance motors, which is applied in the direction of AC motor control, control systems, and mechanical energy control, and can solve problems such as unfavorable system simplification and reliability, reduced suspension control accuracy, and increased suspension system control difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The technical scheme of a five-degree-of-freedom magnetic levitation switched reluctance motor system and control method of the present invention will be described in detail below in conjunction with the accompanying drawings:
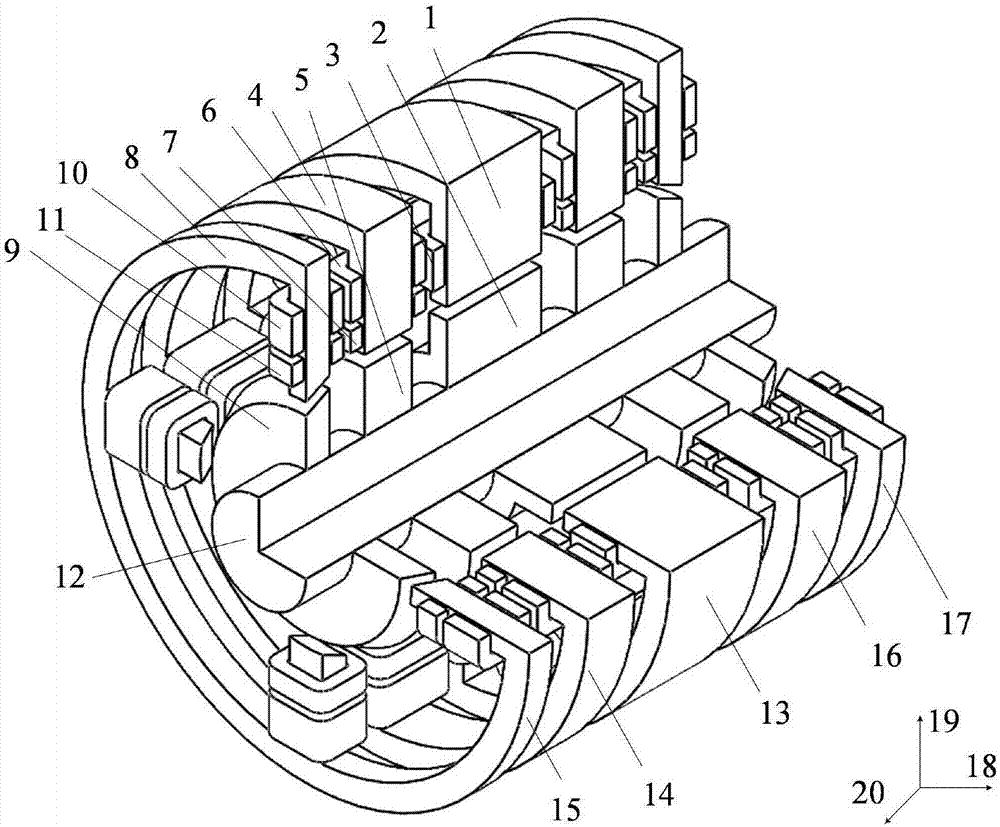
[0067] Such as figure 1 Shown is a three-dimensional structural schematic diagram of an embodiment of a five-degree-of-freedom magnetic levitation switched reluctance motor system embodiment of the present invention, wherein, 1 is a reluctance motor stator, 2 is a reluctance motor rotor, 3 is a reluctance motor coil, and 4 is a radial stator , 5 is the radial rotor, 6 is the radial bias coil, 7 is the radial suspension coil, 8 is the tapered stator, 9 is the tapered rotor, 10 is the axial bias winding, 11 is the axial suspension coil, 12 is the rotating shaft, 13 is the switched reluctance motor, 14 is the radial magnetic bearing Ⅰ, 15 is the tapered magnetic bearing Ⅰ, 16 is the radial magnetic bearing Ⅱ, 17 is the tapered magnetic bearing Ⅱ, 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com