

Unmanned plane cluster cooperation patrol tracking locus programming method based on upper limit confidence interval algorithm
A technology of confidence interval and trajectory planning, which is applied in three-dimensional position/channel control and other directions, and can solve the problem of reducing the intelligence level of UAV group coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
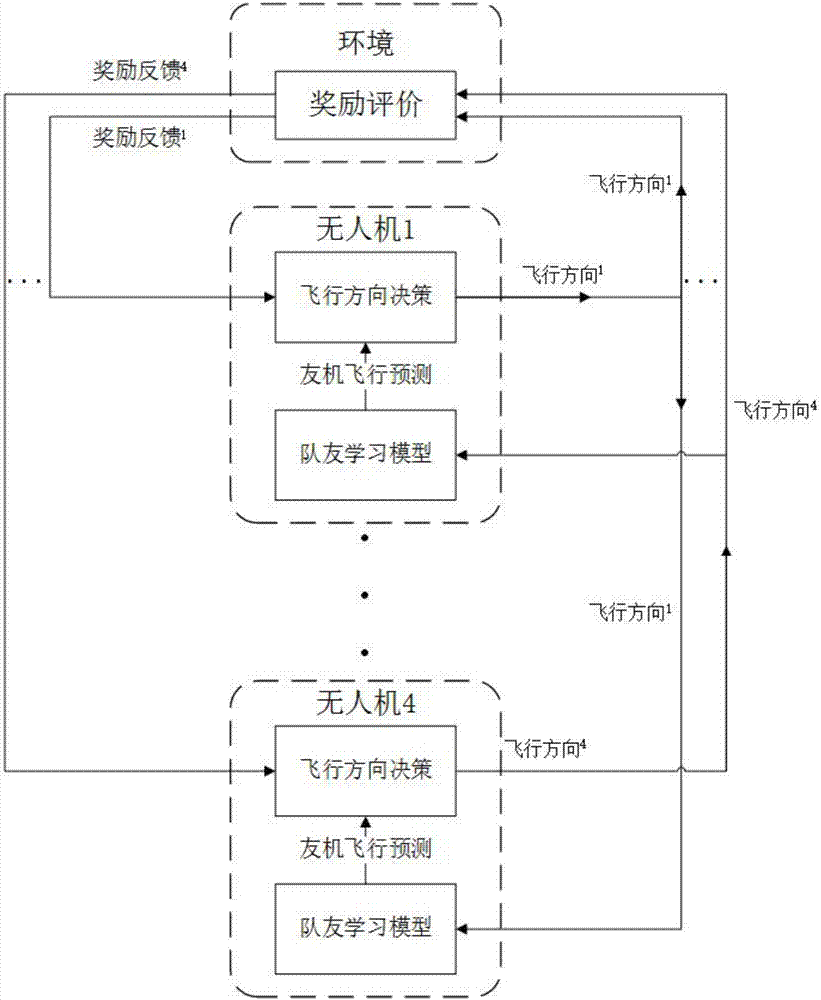
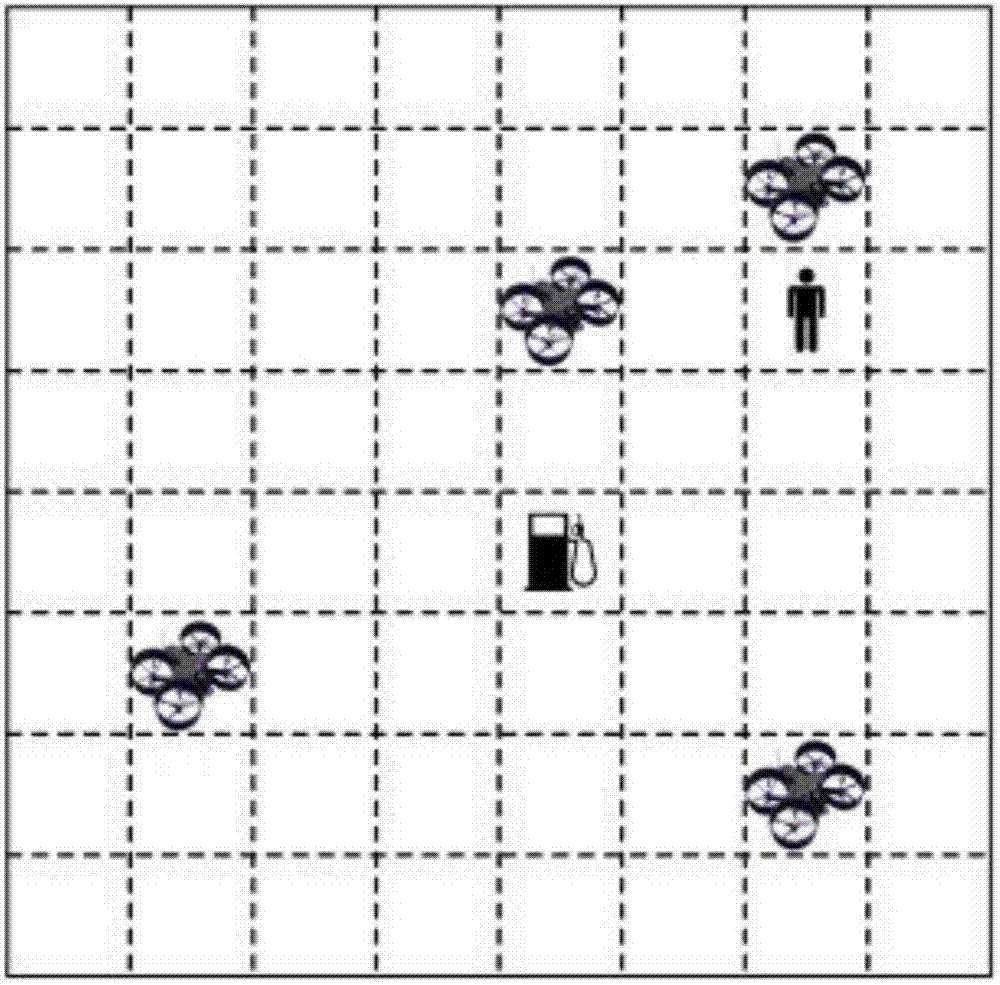
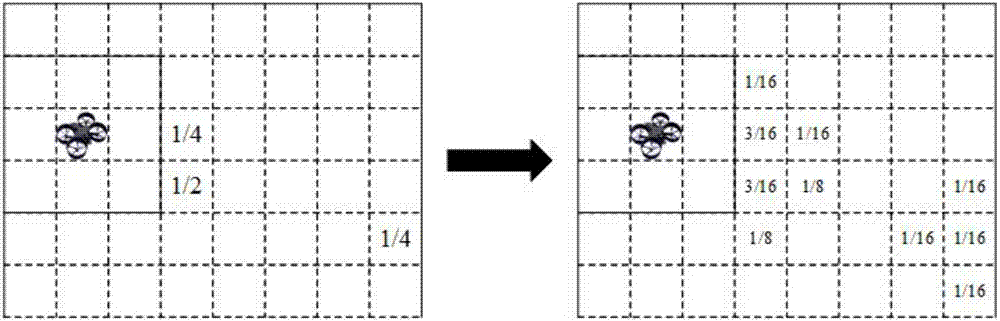
[0047] According to the UCT algorithm-based UAV swarm cooperative patrol tracking trajectory planning method of the present invention, first input the basic information such as the UAV patrol area, the number of UAVs, and the location of the gas station to initialize, and then according to the current target probability model and teammate model , using a UCT-based reinforcement learning algorithm to determine the direction of UAV movement. Each UAV detects targets within its field of view, and updates the target probability model based on the detection results. Afterwards, the UAV uses the Bayesian probability-based teammate learning method to update the teammate model according to the teammate's running direction. Each aircraft in the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More