

High-altitude flame-projecting barrier-removing robot
A technology of robots and firearms, applied in the direction of overhead lines/cable equipment, etc., can solve problems that affect the reliable operation of the power grid and the normal power consumption of the society, heavy handling and installation workload, and difficult to guarantee safety, etc., to achieve lightweight, structural Compact and lightening effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to understand the technical content of the present invention more clearly, the following examples are given in detail, the purpose of which is only to better understand the content of the present invention but not to limit the protection scope of the present invention.
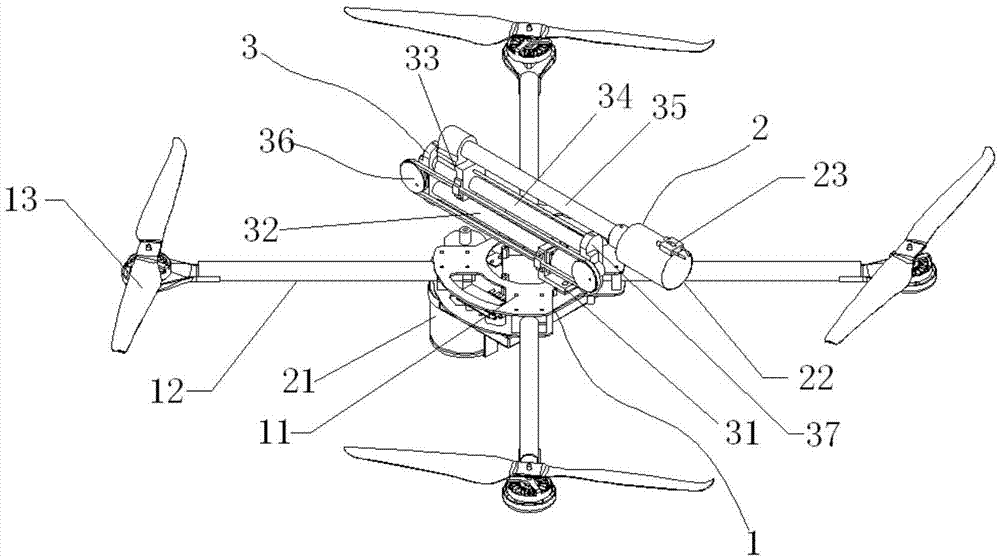
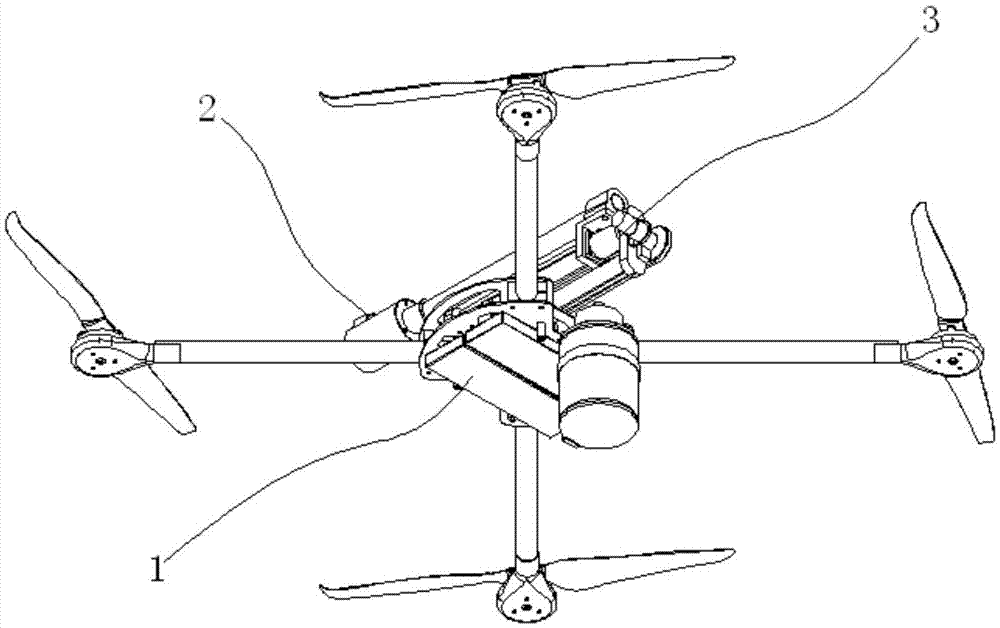
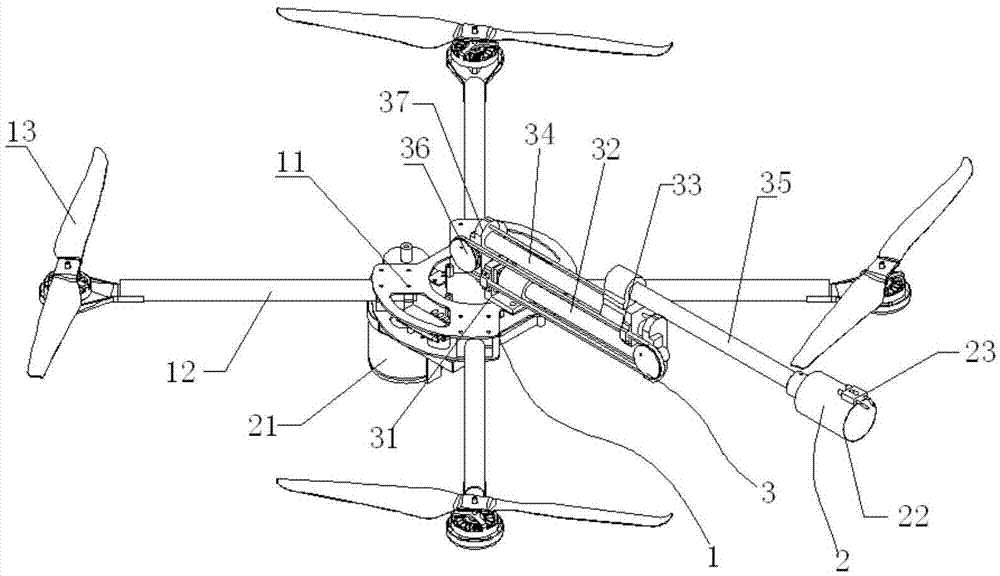
[0031] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, a high-altitude fire-spraying obstacle removal robot includes a multi-axis aircraft 1 and a fire-spraying system 2, the multi-axis aircraft includes a main frame 11, and the fire-spraying system includes a pressurized fuel tank 21, a nozzle 22 and a high-pressure The igniter 23, the pressurized fuel in the pressurized fuel storage tank can be ignited by the high-pressure igniter after being atomized by the nozzle, and also includes a two-stage telescopic mechanism 3, the two-stage telescopic mechanism includes a first-stage sliding Block 31, primary guide rail 32, secondary slide block 33, secondary guide rail 34, extensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More