

State feedback based vehicle path tracking H-infinity control method
A state feedback and control method technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of large impact on tracking accuracy, complex and unsuitable PID parameter adjustment, and achieve accuracy and reliability sexual effect
Inactive Publication Date: 2017-08-04
TONGJI UNIV
View PDF11 Cites 24 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] At present, the most widely used control algorithm is still based on PID control. For ordinary road environments, the control effect is good, but for high-speed roads, large curvature roads and roads with changing driving environments, the adjustment of PID parameters is complicated, and the tracking accuracy is affected by parameters. Large impact, not suitable for unmanned driving in complex traffic environments
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
example
[0099] Carsim and Simulink co-simulation implementation such as image 3 As shown, the vehicle model adopts the existing ones in Carsim: C‐Class, Hatchback model
[0100] C f =21803,C r =21803,l f =1.016m,l r =1.564m
[0101] I z =1536.7kgm 2 ,V x =10m / s, m=1270kg
[0102] can get:
[0103]
[0104] Use the feasp method in the LMI toolbox to obtain a feasible solution:
[0105]
[0106] W * =[-3.7206 13.4245 -7.2804 38.0960]
[0107] K=W * (X * ) -1 =[-2.3394 0.0135 -3.1629 -0.0075]
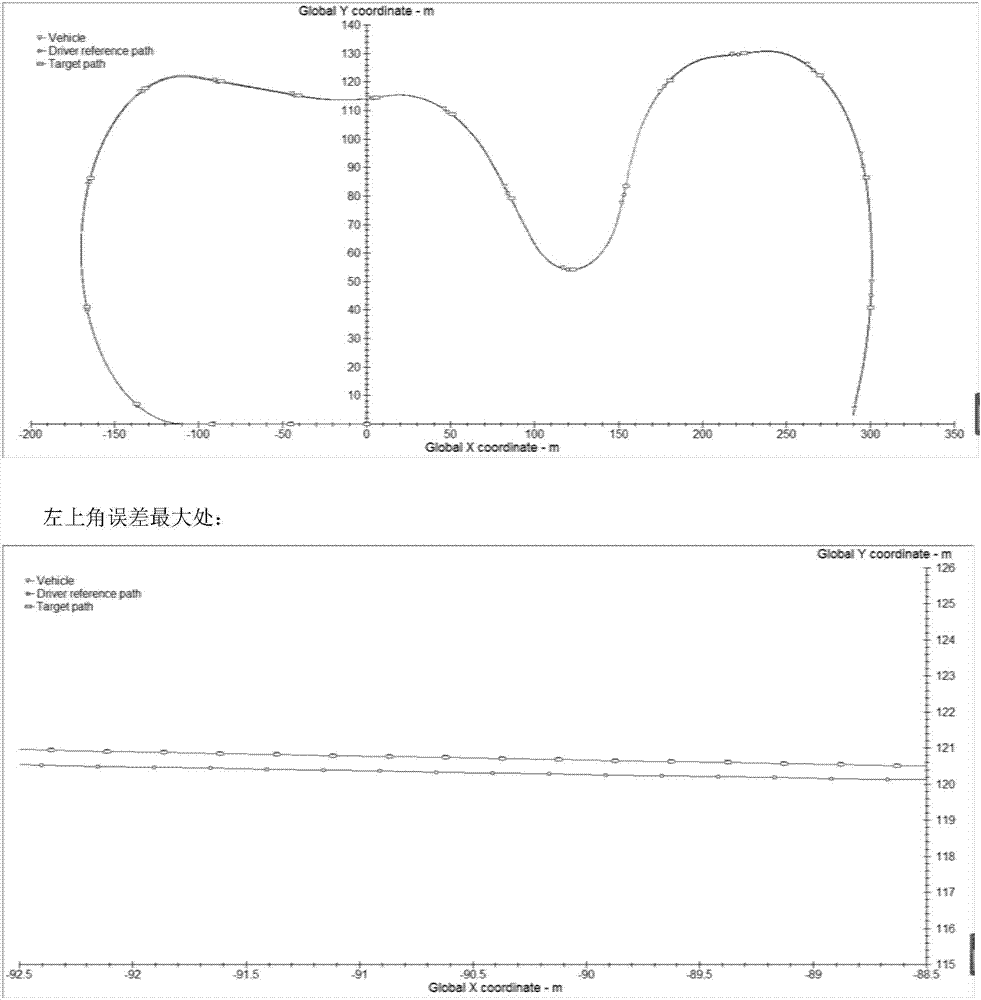
[0108] The simulation results are shown in the figure Figure 4 shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
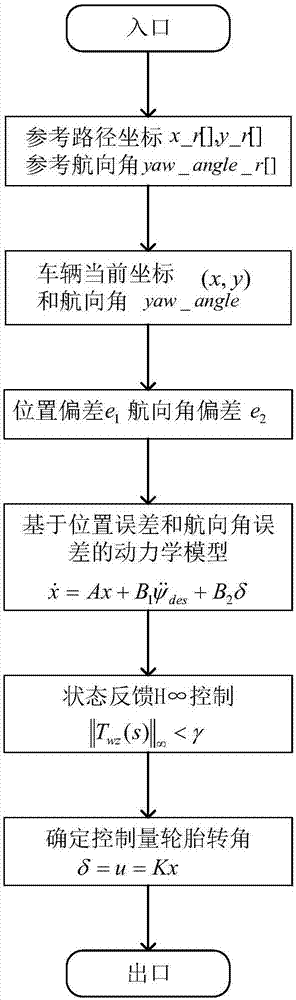
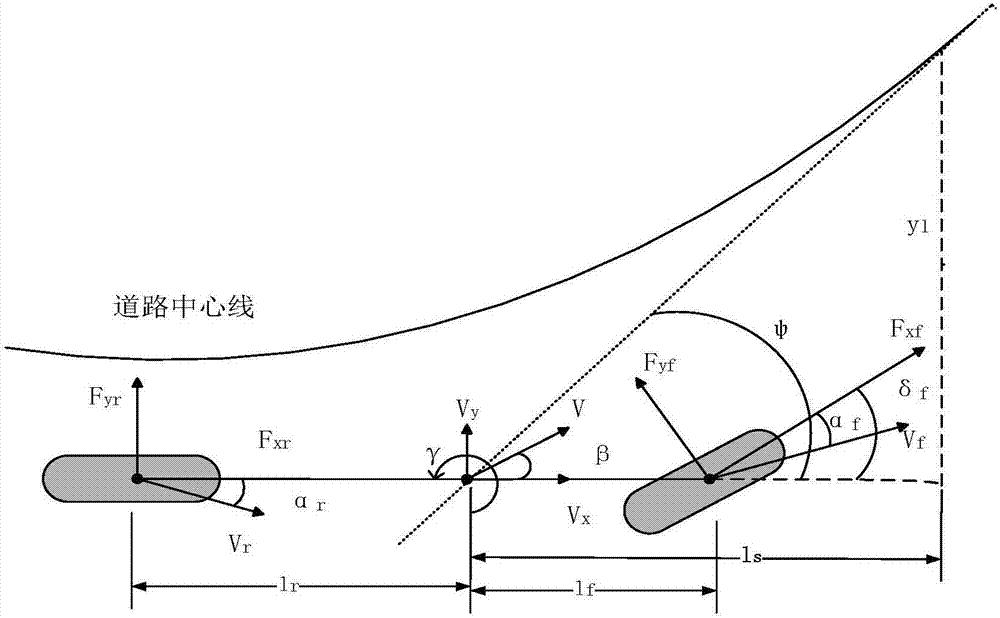
The invention relates to a state feedback based vehicle path tracking H-infinity control method, which comprises the steps of firstly acquiring horizontal and vertical coordinates of a reference path, solving a reference course angle, finding a corresponding reference point on the reference path according to the current position of a vehicle, and calculating the position deviation and the course angle deviation between the reference point and a current point of the vehicle; then improving a single-track traditional vehicle dynamic model into a position deviation and course angle deviation based dynamic model, and acquiring a state equation of the system; then taking major influence factors for transverse motion control of the vehicle in the model as bounded disturbance of the system by referring to the yaw rate, and designing a static state feedback controller according to a state feedback H-infinity control law; and finally, converting into a convex optimization problem with linear matrix inequality constraints and a linear objective function, solving a coefficient matrix of the controller by using a linear matrix inequality toolbox, acquiring controller output, namely, a tire rotation angle, and thus realizing path tracking control for the vehicle. The method provided by the invention is applicable to vehicle path tracking control in complex traffic scenes.
Description
technical field [0001] The invention relates to a new vehicle path tracking H∞ control method based on state feedback, which belongs to the field of vehicle path tracking control. Background technique [0002] The intelligentization of automobiles has been developed in full swing in recent years. Google, Baidu, LeTV, Tesla and other companies have invested heavily in the development of intelligent driving technology. In November 2016, China released a roadmap for unmanned driving technology, aiming to achieve highly or fully autonomous driving by 2021. Automobile intelligence can effectively improve the traffic accidents, traffic congestion and pollution emissions of vehicles under the current traffic system. The most important thing is to improve the safety of vehicles. Most traffic accidents are caused by human errors of drivers. Intelligent driving can effectively change this situation. At the same time, intelligent driving can improve the stability, ride comfort and co...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G05B13/04
Inventor孙虹张长柱陈启军沈梦娇陈龙泉安广永
OwnerTONGJI UNIV