

Novel master-salve mode surgical robot control method
A surgical robot and control method technology, applied in the field of master-slave teleoperated surgical robot modeling and control, can solve the problems of high price, no dynamic control function, and inconvenient maintenance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
[0032] This embodiment provides a new master-slave remote operation robot control system and method, and improves the safety and reliability of the operation through force feedback technology, so that the doctor can feel the interaction between the remote actuator and the tissue when performing the teleoperation operation. Interaction.
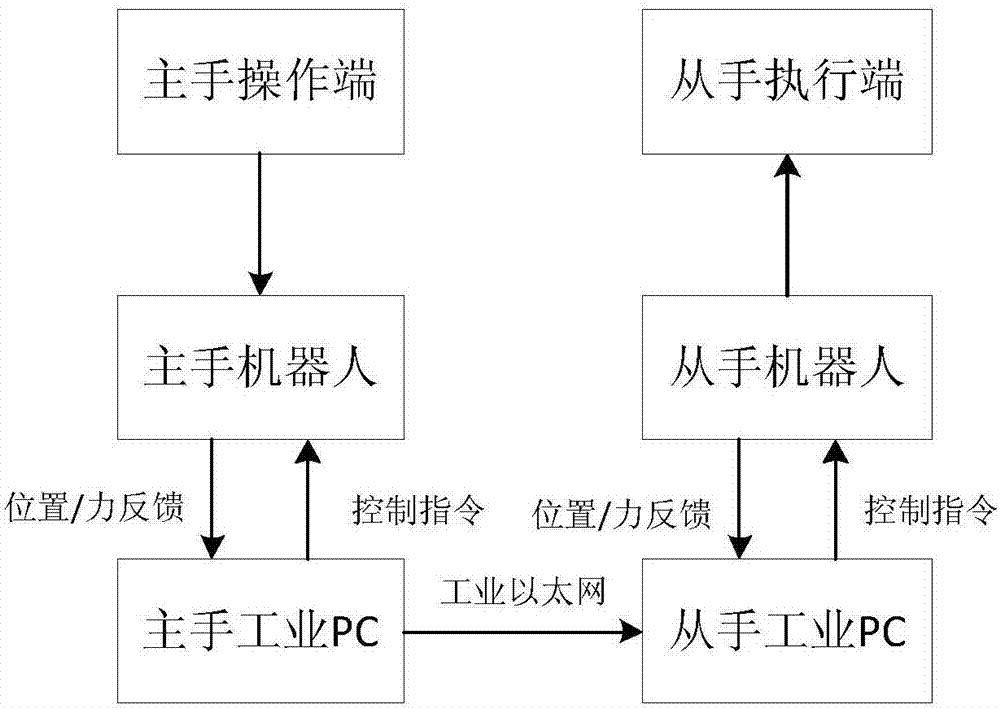
[0033] A novel master-slave teleoperation surgical robot control system, which is realized through the following technical solutions:
[0034] It includes a master hand control terminal, a slave hand execution terminal and a communication system; the master hand control terminal includes a master hand robot and an industrial PC control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More