

Control method for movable type four-wheel all-dimensional steering robot chassis
A control method and robot technology, applied in power steering mechanism, electric steering mechanism, steering mechanism, etc., to achieve the effect of flexible steering and improved motion stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with specific embodiment and accompanying drawing, technical scheme of the present invention is described in further detail:
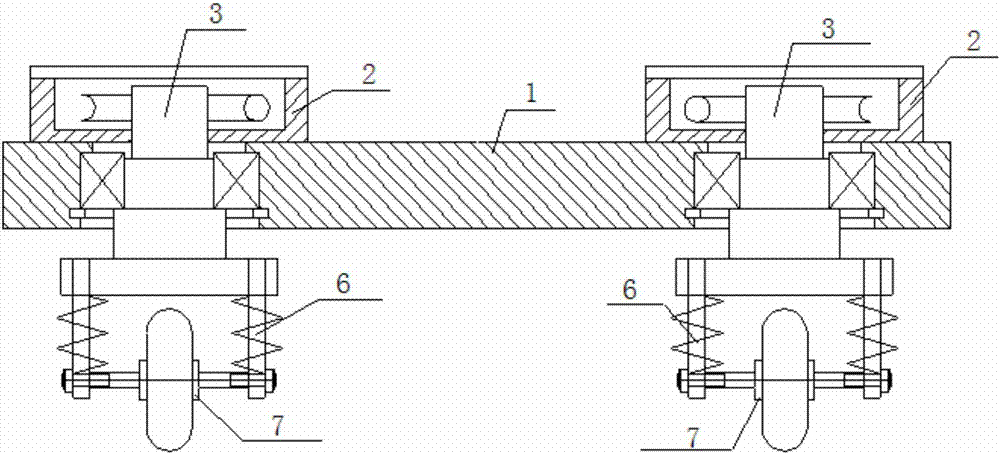
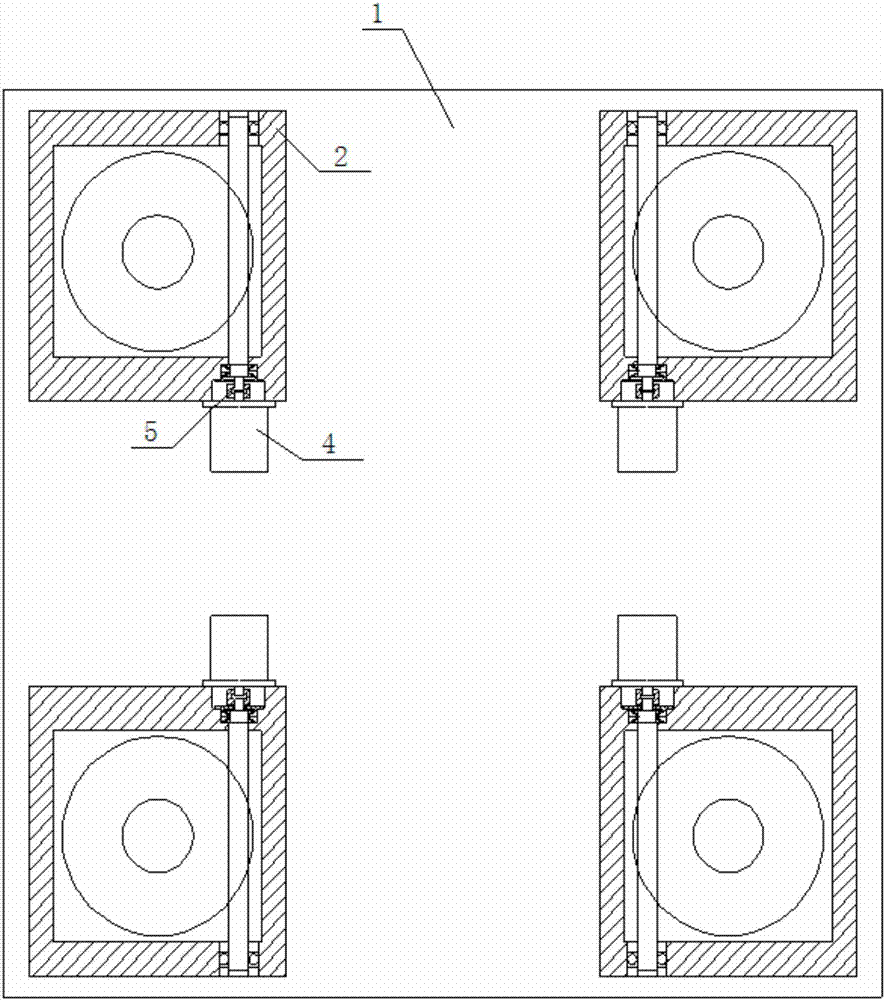
[0031] Such as Figure 1 to Figure 4 as well as Figure 8 A mobile four-wheel omni-directional steering robot chassis shown includes a vehicle frame 1, a wheel set and a PLC control system, and four bearing holes are symmetrically arranged on the vehicle frame 1 for installing the wheel set, and each set The wheel set includes a gearbox 2, a steering shaft 3, a servo motor 4, a coupling 5, a shock absorber 6, and a hub motor 7;
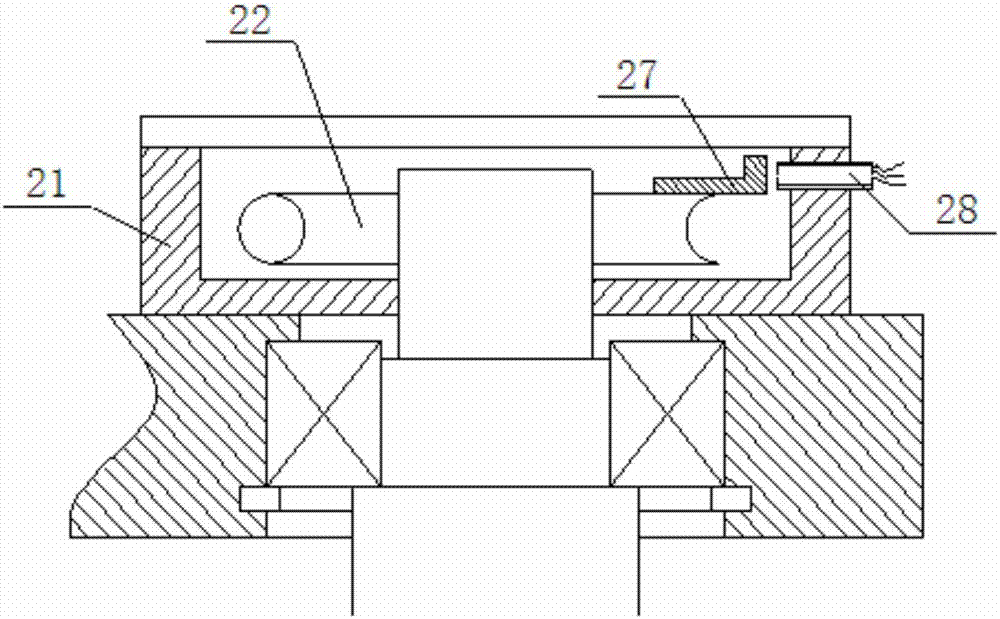
[0032] The reduction box 2 includes a box body 21, a worm wheel 22, a key 23, a worm screw 24, a bearing 25, an angle bearing 26, an induction block 27, and an induction switch 28. The worm wheel 22 is installed on the steering shaft 3, and the worm screw 24 is installed On the box 21 and meshed with the worm wheel 22, it is used to drive the worm wheel 22 to run. The key 23 is installed between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More