

Hull deformation angle estimation method based on interactive multi-model filtering
An interactive multi-model, deformation angle technology, applied in directions such as navigation through velocity/acceleration measurement, can solve problems such as affecting the estimation accuracy and uncertainty of deformation angle model parameters, and achieve the effect of high estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] Below in conjunction with accompanying drawing, the present invention is described in more detail:
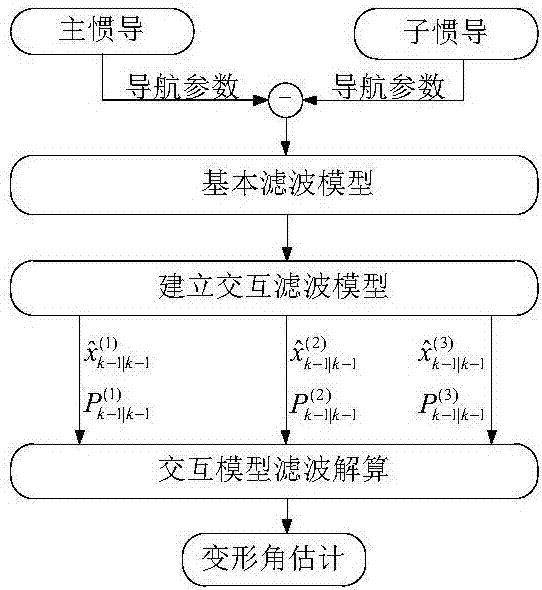
[0055] Step 1: Install a set of hull navigation devices on the bow and stern of the ship, namely the main inertial navigation and sub-inertial navigation, and establish a basic filtering model for the two sets of inertial navigation;
[0056] The system state vector of the basic filtering model is
[0057]
[0058] In the formula, δV represents the speed error between the main inertial navigation system and the sub-inertial navigation system, Indicates the attitude error of the main inertial navigation system and the sub-inertial navigation system, ▽ and ε represent the accelerometer zero bias and gyro drift, respectively, ξ represents the installation error angle between the main inertial navigation system and the sub-inertial navigation system, θ represents the deflection angle, Indicates the angular rate of deflection deformation.
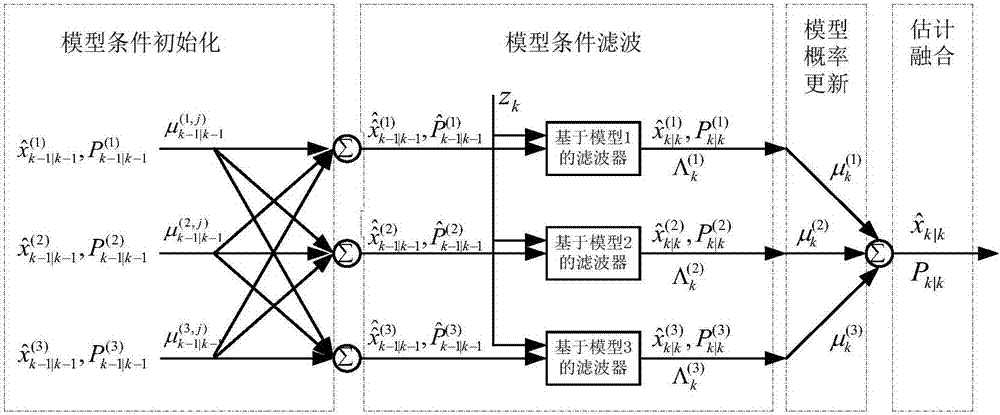
[0059] The hull deformation mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More