

Electric transmission line insulator sweeping pole-climbing robot with climbing deviation rectification function
A technology for transmission lines and insulators, applied in the field of robots, can solve problems such as low operation efficiency, high labor intensity, and hidden safety hazards, and achieve the effects of reducing labor intensity, high structural reliability, and improving safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
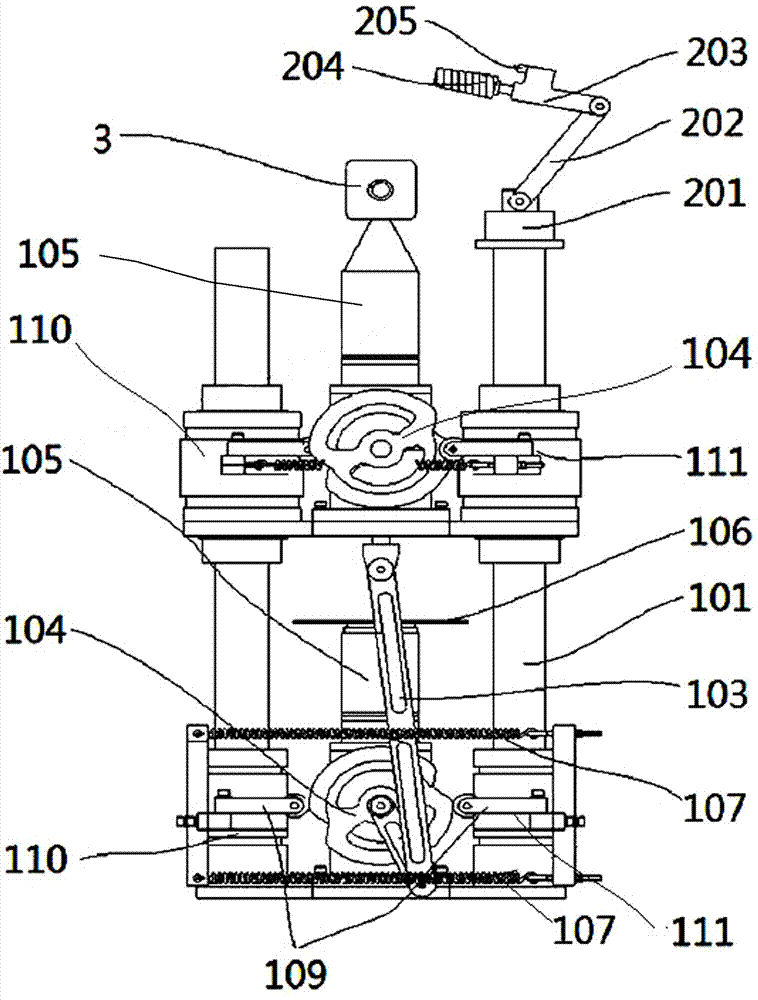
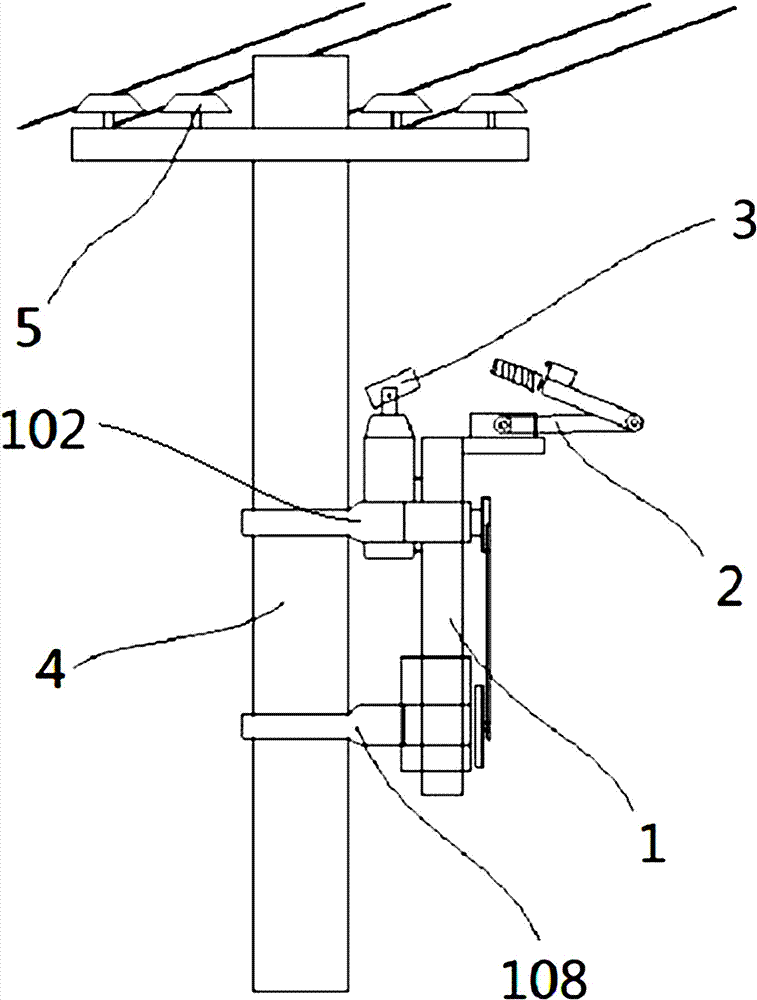
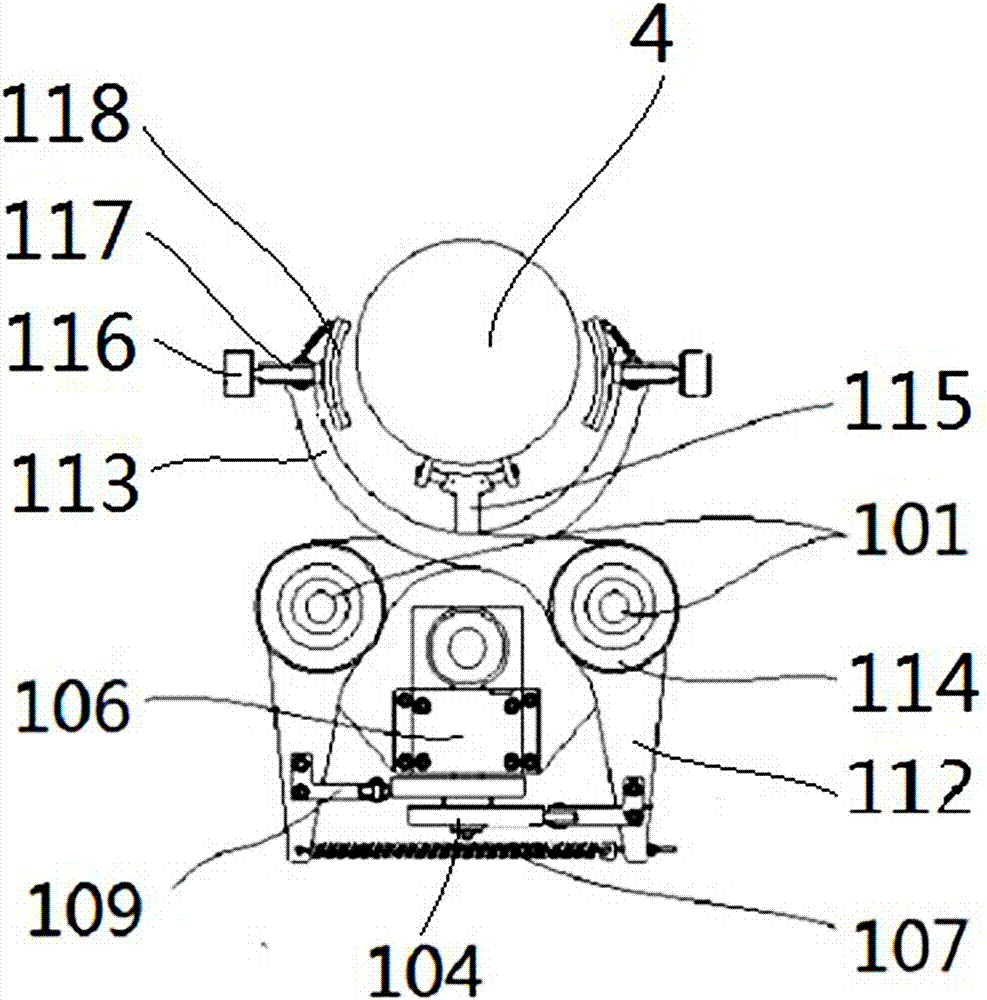
[0031] Such as Figure 1-3As shown, it includes a pole-climbing robot body 1 for climbing the pole 4, a detection pan-tilt 3 with a wireless communication module set on the top of the pole-climbing robot body 1 for taking pictures of insulators 5, The cleaning robot arm 2 used to clean the insulator 5 on the upper part of the pole robot body 1, the control module 106 used for robot crawling control on the pole climbing robot body 1, and the control module 106 for the control personnel to control the working state of the robot. A robot ground host computer control system with a wireless communication module, the pole-climbing robot body 1 is provided with a crawling deviation correction device for correcting the trajectory of the pole-climbing when climbing the pole, and the control module 106 is provided for using The crawling devia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More