

Method for quickly extracting tree heights jointly by aid of total-station instruments and unmanned aerial vehicle images
An extraction method and unmanned aerial vehicle technology, which is applied in the directions of instruments, surveying and navigation, photogrammetry/video metrology, etc., can solve the problem of missing information in local areas, and achieve the effect of avoiding tedious work and simplifying the work process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
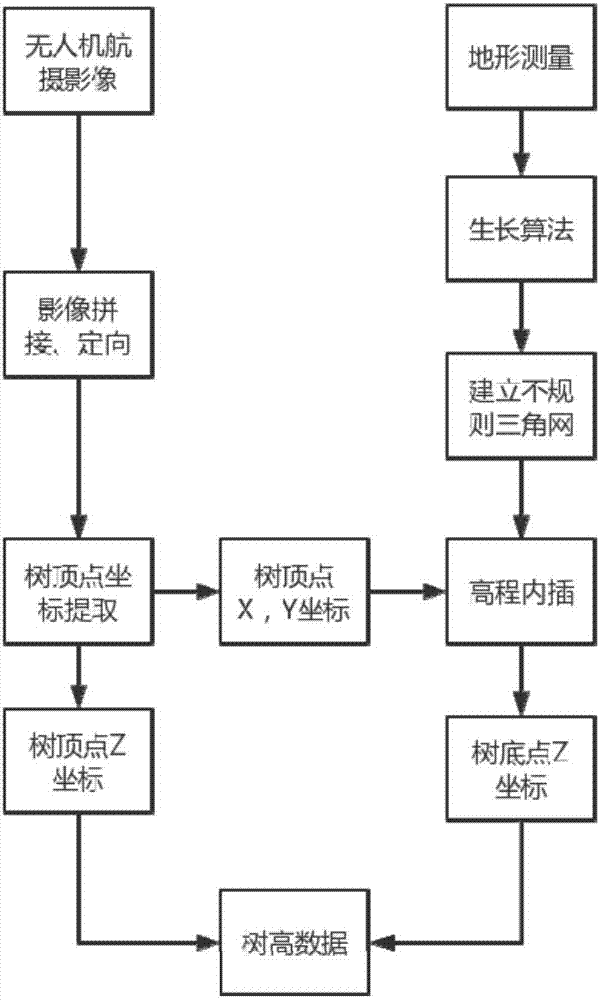
[0021] Specific embodiment one: a kind of total station and unmanned aerial vehicle image combined tree height rapid extraction method comprises the following steps:
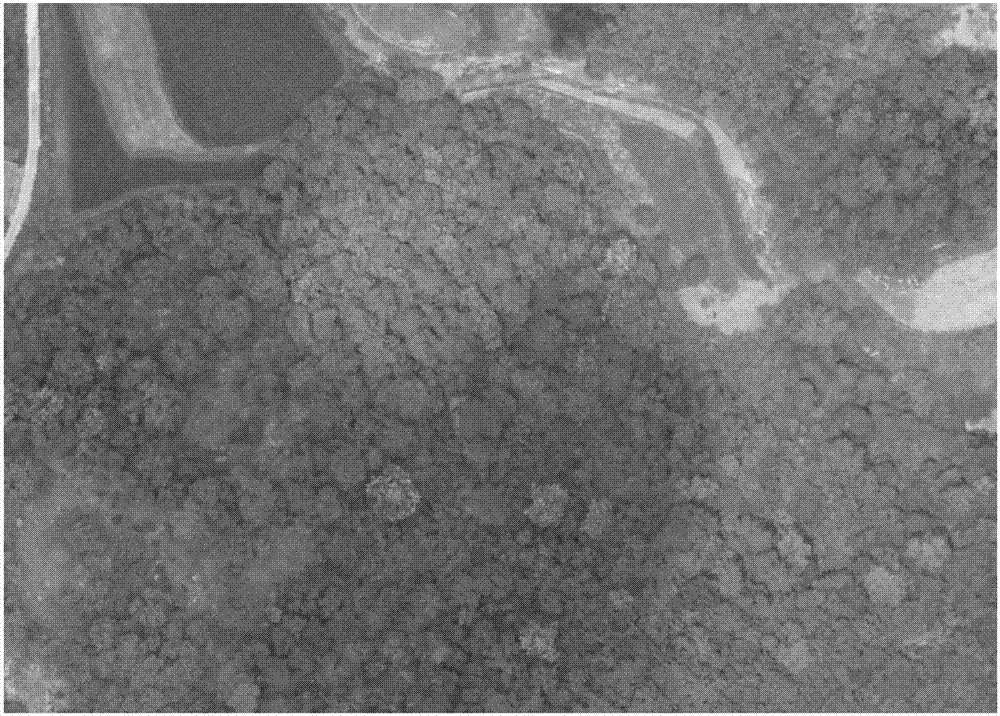
[0022] Step 1: Utilize unmanned aerial vehicle to gather the image of woodland, utilize total station or GPS-RTK to gather the terrain data of woodland; Described terrain data includes coordinate of control point and broken step point coordinate;
[0023] Step 2: Perform directional splicing on the images collected by the UAV in Step 1 and the coordinates of the control points to obtain the digital orthophoto image (DOM) of the woodland, and perform stereoscopic observation of the digital orthophoto image data of the forest land to obtain the coordinates of the treetop points;
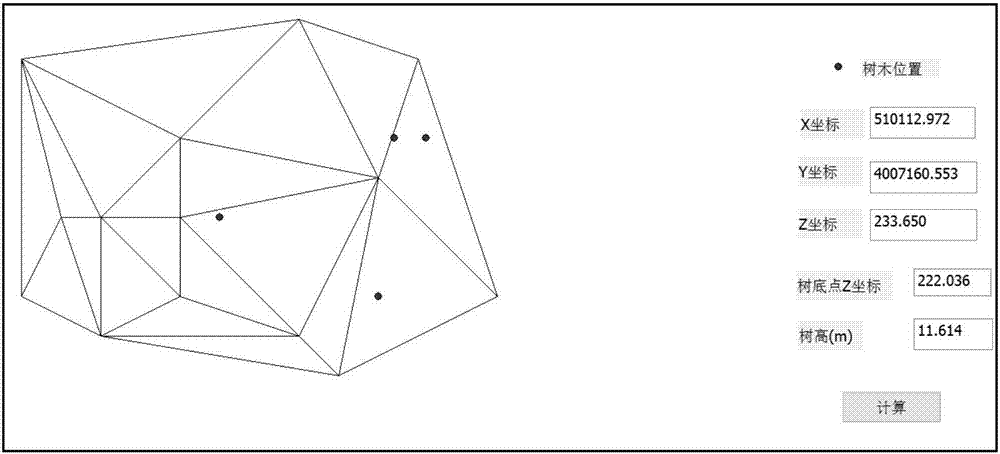
[0024] Step 3: Use the natural growth algorithm (Delaunay) to generate an irregular triangulation from the terrain data collected in Step 1;
[0025] Step 4: Using the treetop point coordinates obtained in step 2, perform elevation inter...
specific Embodiment approach 2
[0026] Specific embodiment two: the difference between this embodiment and specific embodiment one is: UAV is used to collect the image of forest land in the described step one, and the specific process of utilizing total station or GPS-RTK to collect the terrain data of forest land is:
[0027] Determine the flight route and flight height of the UAV, the course overlap rate of the UAV is greater than or equal to 60%, and the side overlap rate is greater than or equal to 30%; set the ground control point, and use the total station or GPS-RTK to measure the coordinates of the ground control point , each route has more than 6 ground control points; the total station or GPS-RTK uses the control points to collect the coordinates of the forest area topography.
[0028] The route setting is to determine the flight route and flight height of the UAV according to the actual situation of the forest area and the required aerial photo resolution. When determining the route, it is necessar...
specific Embodiment approach 3
[0033] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in the step two, the image and the coordinates of the control points collected by the drone in the step one are oriented and spliced to obtain the digital orthophoto image of the woodland. The specific process of obtaining the coordinates of treetop points through stereoscopic observation of digital orthophoto image data of forest land is as follows:
[0034] Step 21: internal orientation of the image; the internal orientation is carried out to the image obtained in step one to complete the scanning coordinates (scanning coordinates formed due to the position of the image on the scanner during the image digitization process) to the image coordinates (based on the image image) The point is the origin of the coordinate system. For aerial images, the line connecting two opposite sides of the mechanical frame mark is the coordinate system frame mark coordinate system of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More