

Navigation method realized by means of loose combination of visual navigation/inertial navigation
A technology of inertial navigation and visual navigation, applied in the field of navigation, can solve the problems of poor navigation accuracy, incomplete visual navigation/inertial navigation combined navigation, error accumulation over time, etc., and achieve high-precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with specific embodiments.
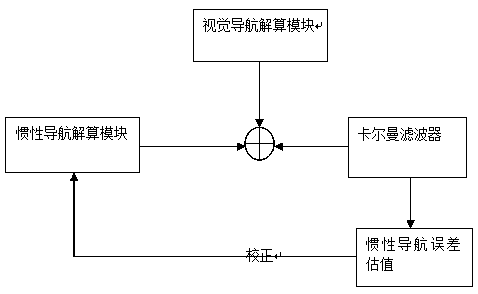
[0017] Such as figure 1 Shown, the steps of this embodiment are as follows:
[0018] Step 1, inertial navigation solution;
[0019] specifically is:
[0020] Select the local northeast sky geographic coordinate system as the navigation coordinate system, and the three-axis direction of the carrier coordinate system (system b) is "right, front, up";
[0021] (1) Initial alignment: Platform inertial navigation is the alignment between the physical platform and the navigation coordinate system; strapdown inertial navigation is the given initial attitude transformation matrix, that is, the given carrier coordinate system (b system) and navigation coordinate system (n department) relationship.
[0022] (2) Attitude update: According to the angular rate sensitive to the gyroscope, use the quaternion method for attitude update, and then convert the updated quaternion into an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More