

Quadruped robot motion planning method oriented to unknown rough terrain
A technology of robot movement and quadruped robot, applied in the field of quadruped robot motion planning, can solve the problems of discontinuous movement, slow moving speed of robot, no consideration, etc., and achieve the effect of continuous adaptive walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
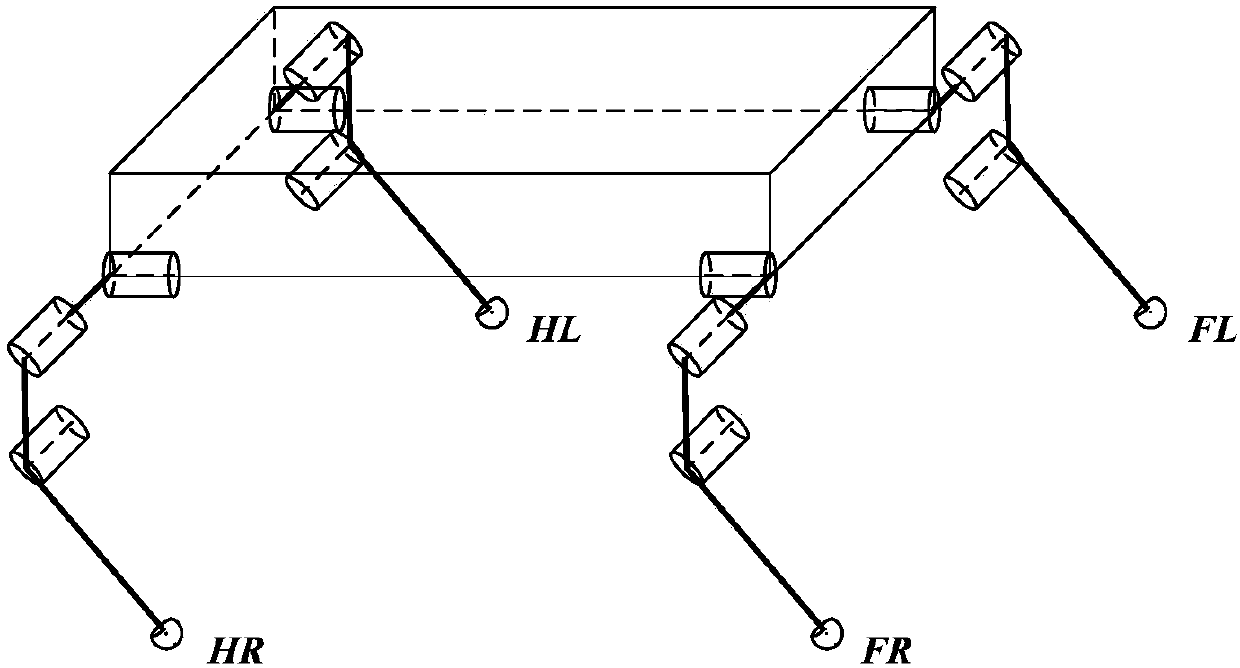
[0051] Below to figure 1 The twelve-degree-of-freedom quadruped robot shown is a specific embodiment, and the present invention is described in detail.
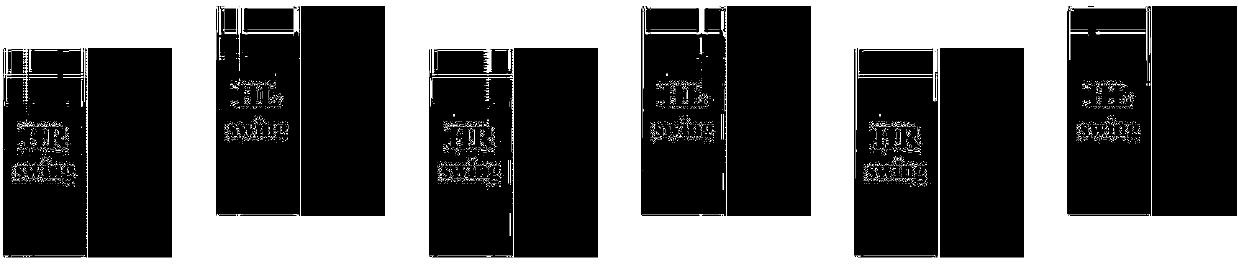
[0052] The quadruped robot adopts a crawling gait when facing an unknown rough terrain, and its leg swing time sequence analysis model is as follows: figure 2 As shown, it can be seen from the figure that each leg of a quadruped robot can be divided into a swing phase and a support phase, while the crawling gait naturally divides a motion cycle into six state phases. The robot will use the leg swing sequence shown in the figure to perform periodic motion until it moves to the target pose point.
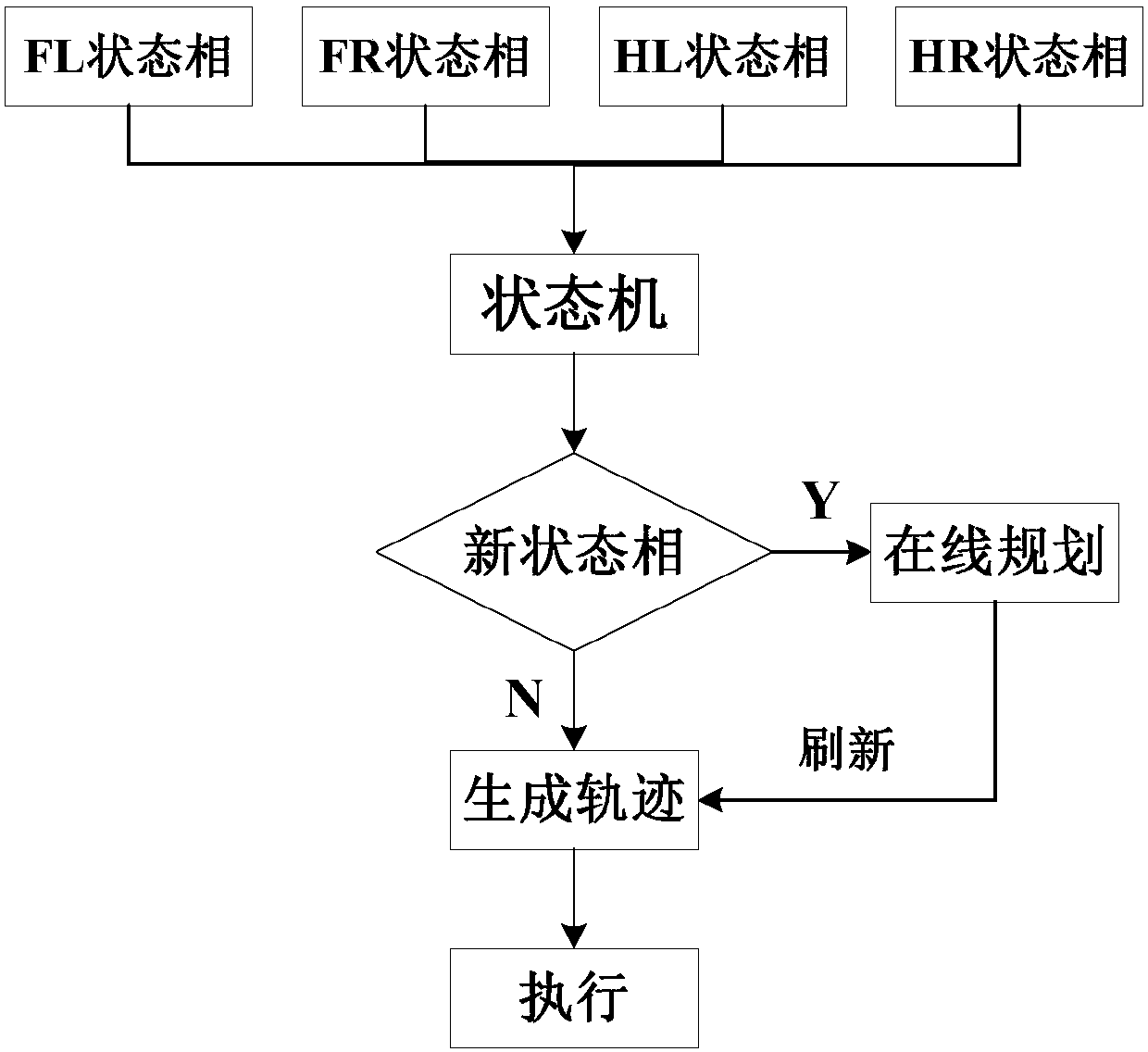
[0053] In the single-leg swing phase, the swing leg lands to trigger the next state phase; in the quadruped support phase, the next state phase is triggered at the time of the currently planned quadruped support phase. The online planning process of quadruped robot is as follows: image 3 As shown, once entering a new state phase...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More