

Path planning method for multiple mobile robots based on improved genetic algorithm
A technology for improving genetic algorithms and mobile robots is applied in the field of multi-mobile robot path planning based on improved genetic algorithms to achieve the effects of improving quality and efficiency and increasing population diversity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below with reference to accompanying drawing, through the description of embodiment, the specific embodiment of the present invention such as the shape of each component involved, structure, mutual position and connection relationship between each part, the effect of each part and working principle, manufacturing process And the method of operation and use, etc., are described in further detail to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
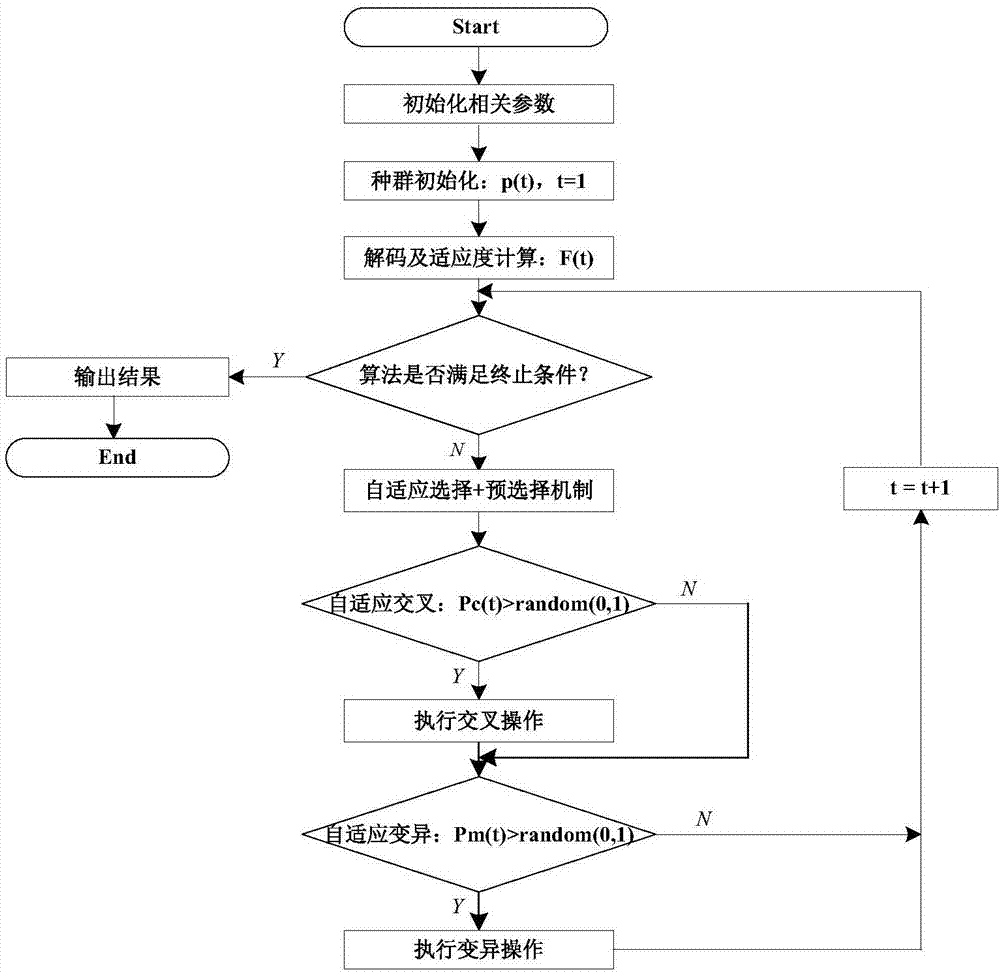
[0039] A multi-mobile robot path planning method based on an improved genetic algorithm, which is used to obtain optimal or near-optimal path planning and realize global optimization of mobile robots. The specific steps of the method include the following:
[0040] Step 1: Initialize the relevant parameters of the algorithm, such as the population size m, the termination evolution algebra T and the adjustment param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More