Working mode for binocular vision remote control ball-picking robot system
A robot system and remote control technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of inability to remotely control, large control limitations, etc., to improve the efficiency of picking up balls, expand the field of vision, and enrich the application scenarios Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention is specifically set forth below by means of specific embodiments:
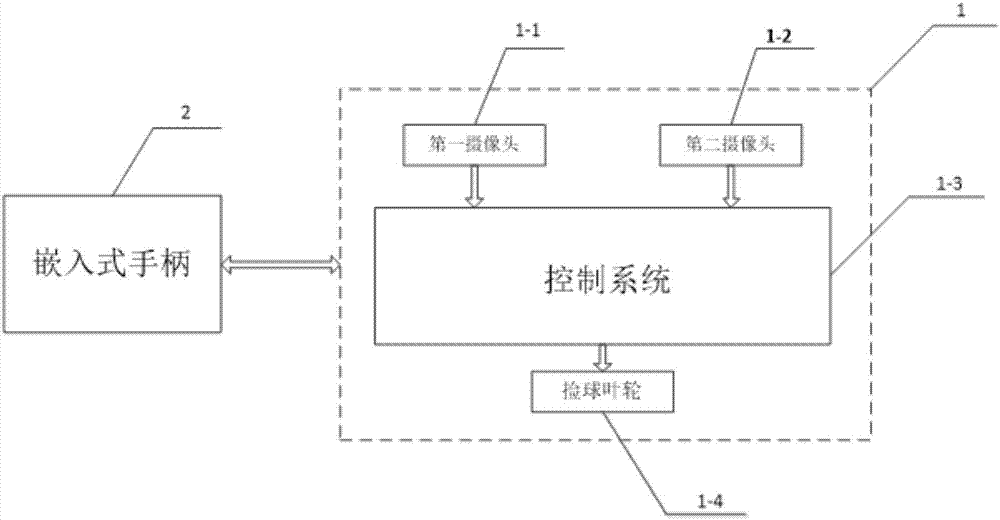
[0040] Such as figure 1 As shown, the binocular vision remote control ball picking robot system of the present invention consists of a binocular vision remote control ball picking robot 1 and an embedded handle 2.
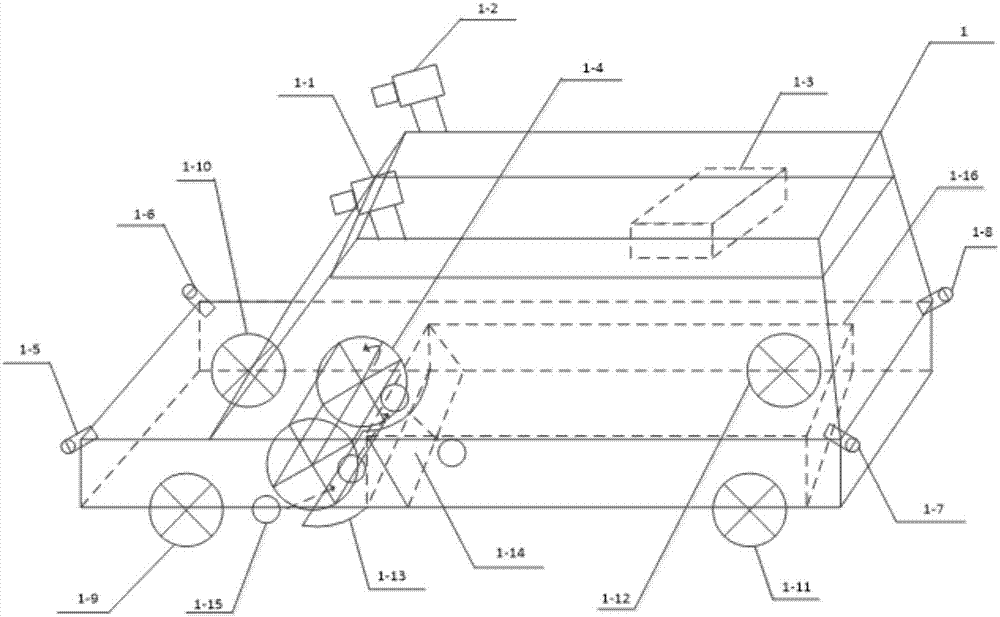
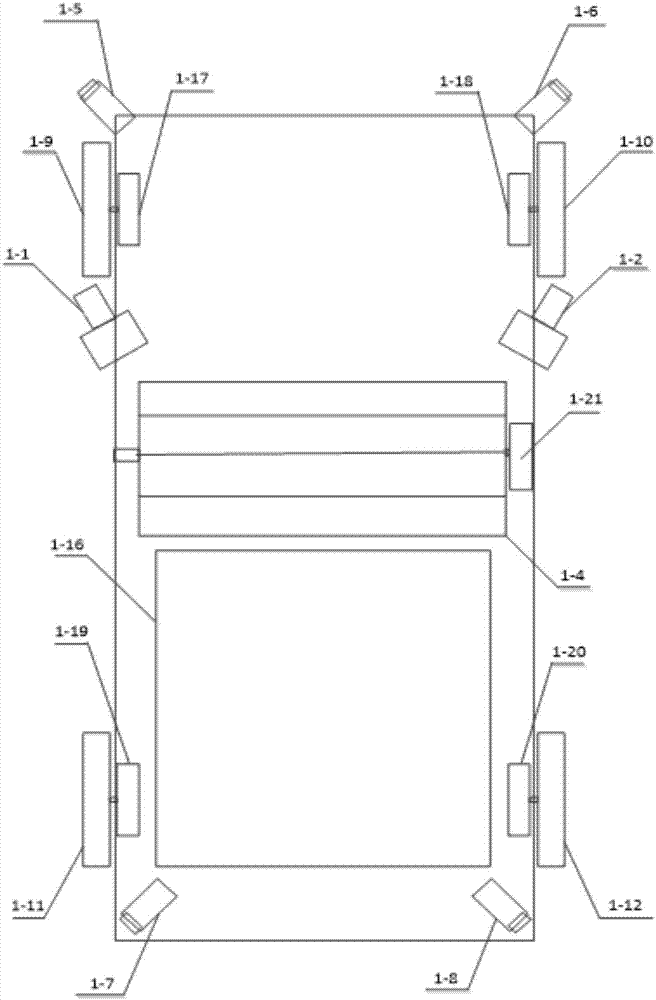
[0041] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the binocular vision remote control ball picking robot 1 is composed of a binocular vision system, an environment perception system, a ball picking system, a motion system, and a control system 1-3.
[0042] Such as figure 2 , image 3 , Figure 4 As shown, the binocular vision system of the binocular vision remote control ball picking robot 1 is connected with the control system, which includes a first camera 1-1 and a second camera 1-2, and is characterized in that: the first camera 1-1, the second camera 1-2 The two cameras 1-2 are located at the top of the dual-mode intelligent ball-pickin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com