

Robust adaptive nonsingular terminal sliding-mode control method of automatic train operation
A technology for automatic train operation, non-singular terminal, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of model uncertainty position and speed tracking control, and achieve the effect of eliminating singularity
Inactive Publication Date: 2017-08-29
BEIJING JIAOTONG UNIV
View PDF4 Cites 15 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The purpose of the present invention is to provide a robust adaptive non-singular terminal sliding mode control method for automatic train operation to solve the problem of position and speed tracking control under the influence of unknown parameters, model uncertainty and external disturbances
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
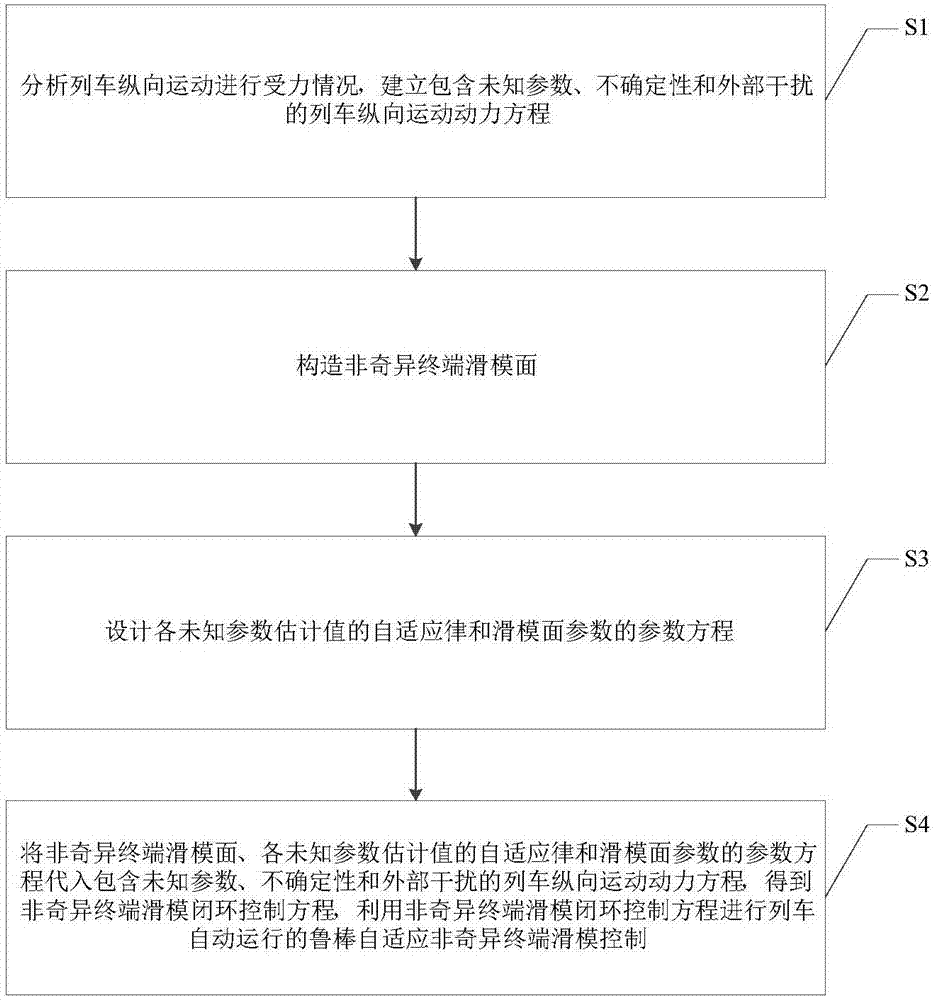
The invention discloses a robust adaptive nonsingular terminal sliding-mode control method of automatic train operation. The method comprises that S1) the bearing condition of vertical movement of a train is analyzed, and a train vertical movement power equation including unknown parameters, uncertainty and external interference is established; S2) a nonsingular terminal sliding-mode surface is constructed; S3) an adaptive law of estimated values of the unknown parameters and a parameter equation of parameters of the sliding mode surface are designed; and S4) the nonsingular terminal sliding-mode surface, the adaptive law of estimated values of the unknown parameters and the parameter equation of parameters of the sliding mode surface are substituted into the train vertical movement power equation including the unknown parameters, uncertainty and external interference, a nonsingular terminal sliding-mode closed-loop control equation is obtained, and the nonsingular terminal sliding-mode closed-loop control equation is used to implement robust adaptive nonsingular terminal sliding-mode control of automatic train operation. Thus, position and speed tracking errors of an ATO system can reach the sliding surface within limited time and converged to 0 within limited time.
Description
A Robust Adaptive Nonsingular Terminal Sliding Mode Control Method for Automatic Train Operation technical field The invention relates to the technical field of train control. More specifically, it relates to a robust adaptive non-singular terminal sliding mode control method for automatic train operation. Background technique With the large demand and development of modern railway transportation system, the pursuit of train running speed is very urgent and inevitable. Therefore, it is necessary to improve the performance of the current automatic train control (ATC) system to achieve high efficiency, high safety and high precision. The ATC system mainly includes three subsystems, namely automatic train monitoring (ATS) system, automatic train protection (ATP) system and automatic train operation (ATO) system. Among the three subsystems mentioned above, the ATO system can control all stages of train operation, such as automatic departure, acceleration, cruise, braking, pr...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): G05B13/04
CPCG05B13/042
Inventor 姚秀明赵富董海荣林雪张暖笛
Owner BEIJING JIAOTONG UNIV