

Structural decentralized vibration control system design method
A vibration control and system design technology, applied in design optimization/simulation, calculation, data processing applications, etc., can solve problems such as difficult response, reduced coordination of subsystems, lack of physical relationship between subsystems, etc., to improve control capacity, the effect of reducing specification requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
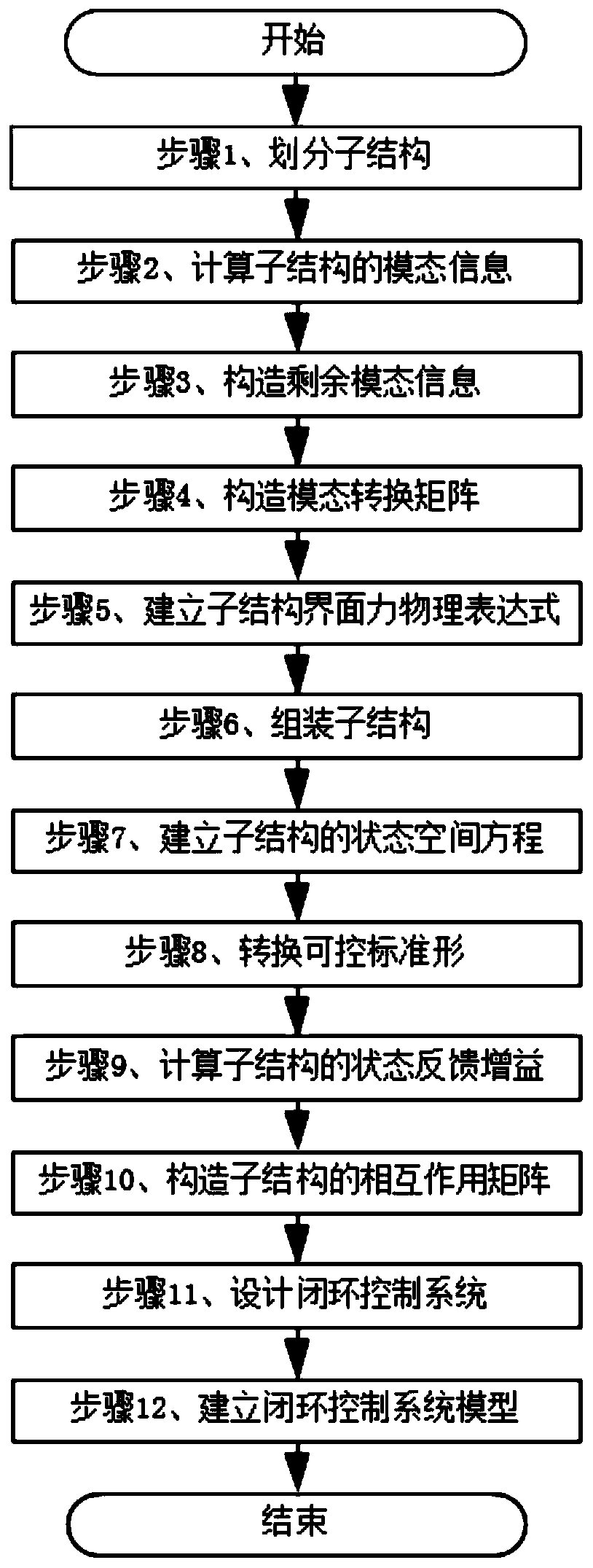
[0092] Such as figure 1 As shown, a method for designing a structural decentralized vibration control system includes the following steps:
[0093] Step 1. Division of substructures: According to the design drawings of the overall structure, the overall structure is divided into several substructures. The division of substructures can be selected according to the focus of the user's attention. Then, according to the finite element method, the motion equation of each substructure under the physical coordinates is established.
[0094] Specifically, after division, observe whether there is a rigid body mode in the substructure, and if there is a rigid body mode, use the frequency shift method to eliminate the singularity of the substructure stiffness matrix. A modal analysis is performed on each substructure to obtain its frequencies and mode shapes.
[0095] Specifically, the motion equation of the overall structure is expressed as:
[0096]
[0097] In the formula, M and...
Embodiment 2
[0231] A method for designing a structure-dispersed vibration control system, the difference from Embodiment 1 is that in step 11, the closed-loop matrix of combining substructures to form an overall structure is defined as follows:
[0232] According to the local state feedback matrix P in step 9 and the interaction matrix F in step 10, calculate the state vector coefficient matrix T in the closed-loop system of the overall structure
[0233] T=(A+BP+BFC)
[0234]
[0235] At this point, the overall closed-loop system matrix is calculated as follows
[0236]
[0237] In the formula, the diagonal elements Relevant only to the poles to which the subsystem is configured;
[0238] off-diagonal elements Mainly depends on the interaction coefficient F ij .
[0239] Finally, if the closed-loop system Ac is stable under the external excitation, the calculation ends. Otherwise, according to step 9, reselect the ideal pole to calculate the closed-loop system matrix Ac u...
Embodiment 3
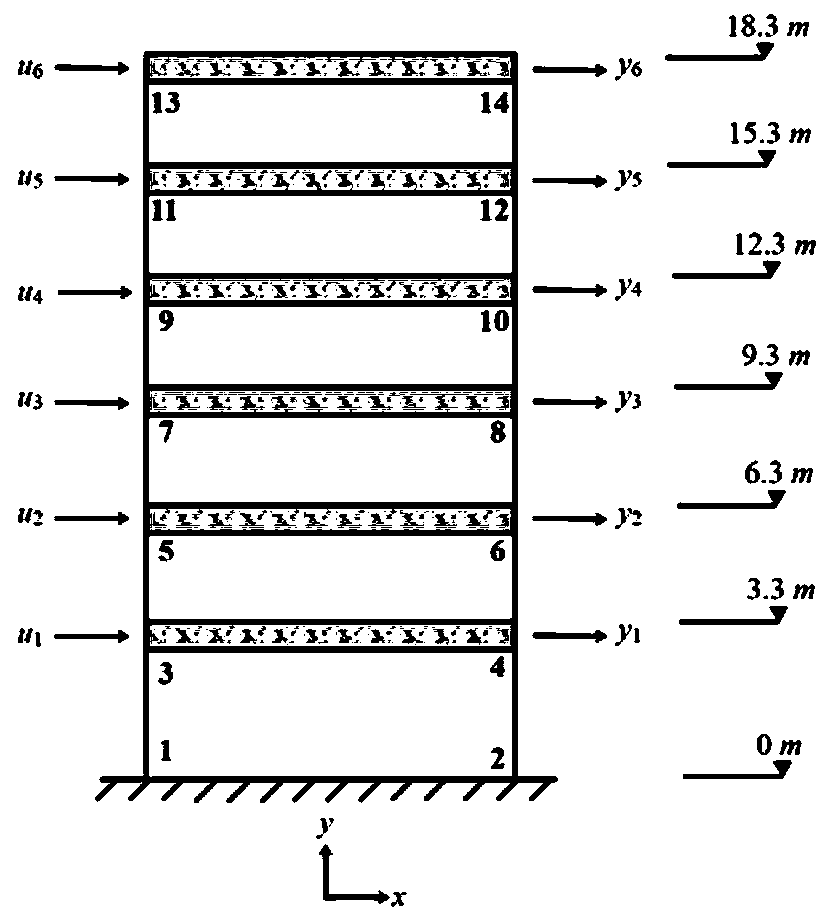
[0241] This embodiment takes a 6-story frame as an example to further illustrate a design method for a structure decentralized vibration control system, which includes the following steps:
[0242] Step 1, such as image 3 As shown, the structure is a 6-story single-span planar frame with a total height of 18.3m. It is a concrete structure. The finite element model of the frame structure is established using Matlab2014. The size is 0.4×0.4m 2 , the size of the beam is 0.20×0.45m 2 , the size of 4~6 storey column is 0.35×0.35m 2 , 0.40×0.17m 2 , the elastic modulus of concrete is taken as 3.0e 10 Pa, Poisson's ratio is taken as 0.3, mass density is 2.36e 3 kg / m 3 . The frame structure includes 14 nodes, and each node has 2 degrees of freedom. The external load of the structure acts on the left node of each floor at the same time, denoted as u 1 ~ u 6 , and take the right node of each floor as the observation point to observe the controlled modal coordinate response (y...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Modulus | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More