Multi-source feature based visual navigation method of lander
A technology of visual navigation and lander, applied in the field of deep space exploration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] In order to better illustrate the purpose and advantages of the present invention, the content of the present invention will be further described below in conjunction with the accompanying drawings and examples.
[0057] The present invention uses a lander visual navigation method based on multi-source features in the landing section of Mars as an example for analysis. The measurement parameters of this navigation method have relatively large uncertainties, which can better reflect the practicability of the present invention. The specific implementation method of this example is as follows:
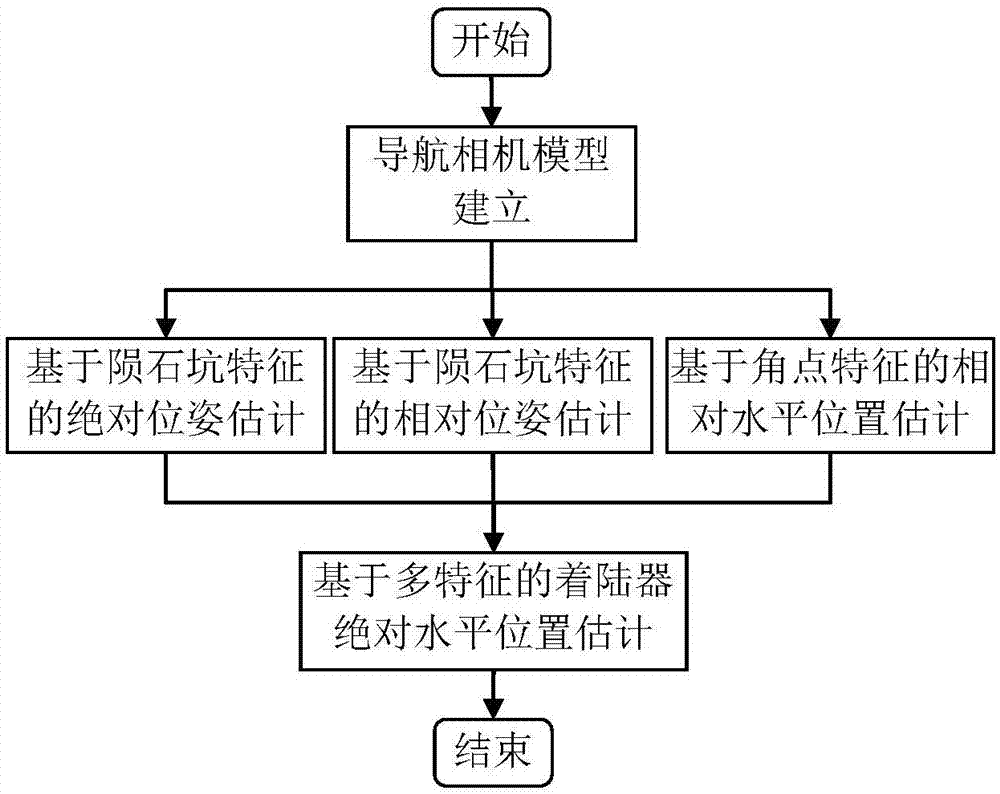
[0058] A lander visual navigation method based on multi-source features, the specific steps are as follows:
[0059] Step 1: Optical navigation camera model establishment
[0060] The navigation camera model adopted is an ideal pinhole model. feature point x s The position coordinates in the landing point coordinate system are (x s ,y s ,z s ,1) T , feature point x s The co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More